Постуральный контроль: Система постурального контроля | KinesioPro
Система постурального контроля | KinesioPro
Постуральный контроль — это понятие, которое используется для описания того, как наша центральная нервная система (ЦНС) анализирует сенсорную информацию от других систем, чтобы произвести адекватный моторный ответ для поддержания контролируемой, вертикальной позы. Зрительная, вестибулярная и соматосенсорная системы являются основными сенсорными системами, участвующими в постуральном контроле и поддержании равновесия.
Постуральная ориентация и равновесие являются двумя основными функциональными целями постурального контроля. Постуральная ориентация контролирует положение и тонус тела по отношению к силе тяжести, опорной поверхности, визуальной среде и внутренним ориентирам. Координация сенсомоторных стратегий для стабилизации центра масс во время как самопроизвольных, так и при внешних стимулах представляет собой постуральное равновесие.
Надлежащий постуральный контроль — это когда человек способен заниматься различными статическими и динамическими видами деятельности, такими как сидение, стояние, опускание на колени, движение на четвереньках, ползание, ходьба и бег, с возможностью сокращать соответствующие мышцы для поддержания равновесия, а также способность вносить небольшие коррективы в ответ на изменения положения и движения, без использования компенсаторных движений. Если даже одна из трех вышеуказанных систем работает не так, как положено, то это может повлиять на постуральный контроль и равновесие. Однако, когда затрагивается одна система, две другие системы могут компенсировать это. Если поражается более чем одна система, то постуральный контроль будет страдать в большей степени.
Друзья, совсем скоро состоится вебинар Георгия Темичева «Двигательный контроль и обучение». Узнать подробнее…
Существуют важные рефлексы, участвующие в поддержании постурального контроля, известные как шейные рефлексы (цервико-окулярный рефлекс, цервико-спинальный рефлекс, цервикоколлический рефлекс) и вестибулоспинальный рефлекс, которые работают в сочетании с вестибулярными ядрами и мозжечком.
Зрительная система
Зрительная система является основным приемником сенсорной информации для поддержания постурального равновесия, и как таковая наша постуральная стабильность возрастает с улучшением визуальной среды.
Существует два функциональных класса движений глаз: те, которые стабилизируют глаза, когда голова движется или кажется, что она движется (стабилизация взгляда) и те, которые сохраняют изображение визуальной цели, сфокусированной на центральной ямке глаза, когда цель изменяется или движется (смещение взгляда).
Стабилизация взгляда
Во время движения головы действуют две системы стабилизации взгляда — вестибуло-окулярная и оптокинетическая. Для того чтобы стабилизация взгляда была эффективной, существуют сопряженные движения, при которых оба глаза движутся в одном направлении.
Смещение взгляда
Чтобы сфокусировать изображение на центральной ямке работают три системы смещения.
- Следящие движения глаз. Определяются как произвольные, плавные, непрерывные, сопряженные движения глаз со скоростью и траекторией, определяемой движущейся визуальной целью.
- Саккады представляют собой короткие, быстрые, отрывистые (баллистические) движения глаз по заданной траектории, которые направляют глаза к некоторой визуальной цели. Эти движения глаз инициируются для того, чтобы привлечь внимание к интересующему объекту.
- Конвергенция — это изменение угла между двумя глазами, чтобы приспособиться к изменению расстояния до визуальной цели. Аккомодация — это механизм, с помощью которого глаза меняет фокус с дальнего изображения на ближнее. При смещении взгляда с удаленного объекта на ближний, глаза сходятся (зрительные оси направлены в носовую часть), чтобы изображение объекта было сфокусировано на центральных ямках обоих глаз.
Вестибулярная система
Вестибулярная система ориентирует туловище в вертикальном положении, используя различную сенсорную информацию, поступающую в том числе из различных сенсорных сред, например, если человек стоит на наклонной поверхности или с закрытыми глазами. Она также контролирует центр масс тела как в статическом, так и в динамическом положении с помощью постуральных реакций (например, пациент стоит или ходит по бревну), а также стабилизирует голову при различных положениях тела.
Она также контролирует центр масс тела как в статическом, так и в динамическом положении с помощью постуральных реакций (например, пациент стоит или ходит по бревну), а также стабилизирует голову при различных положениях тела.
Соматосенсорная система
Соматосенсорная система — это сложная система сенсорных нейронов и путей, которая реагирует на изменения на поверхности или внутри тела. Он также участвует в поддержании постурального равновесия, передавая информацию о положении тела в головной мозг, позволяя ему активировать соответствующую двигательную реакцию.
Механорецепторы — это специфические сенсорные рецепторы, расположенные в мышечных веретенах. Они обеспечивают нервную систему информацией о длине мышц и скорости их сокращения, тем самым позволяя человеку различать движения суставов и чувствовать их положение. Мышечные веретена также обеспечивают афферентную обратную связь, которая может быть преобразована в соответствующие рефлекторные и произвольные движения.
Очень большое количество механорецепторов в мышечных веретенах находится в подзатылочной области. Они отвечают за прием и передачу информации в ЦНС. Импульсы с этих механорецепторов (в частности, с мышц верхней части шейного отдела позвоночника) имеют прямой доступ к вестибулярному ядерному комплексу (ВЯК) — рефлекторному центру, координирующему движения глаз и шеи. С ним связано центральное шейное ядро (ЦШЯ), которое интегрирует вестибулярную, зрительную и проприоцептивную информацию.
Выраженная сенсомоторная дисфункция возникает при травмах (в частности, хлыстовых травмах) верхнего шейного отдела (по сравнению с травмами нижнего шейного отдела), потому что верхнешейный отдел содержит больше мышечных веретен, имеет большую связь со зрительной и вестибулярной системами и большую рефлекторную активность.
Заключение
Вестибулярная, соматосенсорная и зрительная системы действуют не изолированно, а представляют собой сложную систему постурального контроля, которая работает с целью достижения равновесия.
Постуральная стабильность достигается при хорошей сенсомоторной интеграции между верхним шейным отделом позвоночника, зрительными и вестибулярными структурами. Плохой постуральный контроль возникает при наличии сенсорного несоответствия. Другими словами, если ЦНС будет не в состоянии отличить точную и неточную сенсорную информацию от одной или нескольких из этих систем, то это приведет к возникновению ощущения головокружения / неустойчивости / нарушения равновесия, а также изменению «предсказательного» времени сенсорного входа.
Такие пациенты часто жалуются на головные боли, головокружение, нечеткость зрения, напряжение глаз и проблемы с равновесием. Кроме того, они часто испытывают трудности с чтением (горизонтальный дефицит) или у них возникает головная боль / головокружение при взгляде вверх или вниз (вертикальный дефицит). Эти пациенты также могут страдать от боли в шее, т.к. у них может наблюдаться увеличение мышечной активности / скованности, поскольку тело пытается компенсировать потерю равновесия. Описанные выше симптомы могут возникать во время бега или попытке сосредоточиться на движущейся цели, например, мяче. Некоторые пациенты жалуются на то, что чувствуют себя дезориентированными / перегруженными, когда едут по незнакомому городу, ездят по туннелям или толкают тележку в продуктовых рядах.
Источник: Physiopedia — The Postural Control System.
Анатомия и физиология баланса — wellcomclub.ru
Сохранение баланса – сложная биохимическая реакция, она включает в себя несколько нервных и постоянных сенсорных афферентных реакций, образуя обратную связь от периферических рецепторов организма.
К механизмам поддержания равновесия у человека относятся: вестибулярная, зрительная и сенсорная системы. Вся информация интегрируется в центральной нервной системе (ЦНС). Первостепенная роль отводится вестибулярным рецепторам, они определяют силы гравитации, переводят информацию в импульсы, которые расшифровываются мозгом. В результате этого человек осознает положение головы и тела в пространстве, ему доступна информация, которая управляет позными движениями. Деятельность вестибулярных ядер (верхнего, латерального, медиального и нижнего) модулируется и интегрируется множеством афферентных входов.
В результате этого человек осознает положение головы и тела в пространстве, ему доступна информация, которая управляет позными движениями. Деятельность вестибулярных ядер (верхнего, латерального, медиального и нижнего) модулируется и интегрируется множеством афферентных входов.
Вестибулярные ядра связаны с пятью физиологическими системами:
- глазодвигательными ядрами через продольный медиальный пучок;
- ретикулярной формацией через мультисинаптические связи;
- моторной частью спинного мозга через ретикулоспинальные пути и частично медиальный продольный пучок;
- мозжечком;
- вегетативной нервной системой.
Вестибулярная, зрительная и сенсорная системы ответственны за сохранение равновесия. Они считаются триадой постурального контроля, так как каждая система должна быть интегрирована для определения центра тяжести тела.
Соматосенсорная система
Соматосенсорная система получает информацию о взаимном расположении частей тела в статической позиции (так называемая проприоцепция) и в динамических позиций (так называемый кинестезия). Система получает эту информацию от периферических источников, мышц, суставных капсулл и мягких тканей рецепторов (мышечных веретен, окончаний Руффини). Эта система играет важную роль в регуляции позы. Информация должна быть обнаружена периферически и передается централизованно для обработки.
Визуальная или зрительная система
Зрительная система получает информацию о положении тела и движения в пространстве, в частности, положение головы по отношению к окружающей среде. Это способствует изменению положения головы, шеи и всего тела. Зрительный анализатор также обрабатывает информацию относительно движения окружающих предметов, содержащая информацию о скорости движения (т.е. глядя из поезда, вы видите, что вы движетесь).
Вестибулярная система
Вестибулярная система обрабатывает информацию, касающуюся ориентации головы в пространстве и определяет скорость или ускорение. Любое движение головы (в том числе при переносе веса тела для регуляции положения тела) стимулирует вестибулярные рецепторы. Рецепторы раздражаются наклоном или движением головы, при этом возникают рефлекторные сокращения мышц, способствующие выпрямлению тела и сохранению позы.
Если вы хотите узнать больше о деталях работы сенсорных систем, пожалуйста, обратитесь к любому учебнику физиологии.
Постуральный контроль (регуляция положения тела в пространстве) определяется двумя компонентами:
(1) постуральная устойчивость — способность поддерживать вертикальное положение тела, что сопряжено со способностью поддержания центра давления тела внутри границ площади опоры;
(2) постуральная ориентация — способность поддерживать соответствующую взаимосвязь между отдельными структурами тела, между телом и окружающим пространством.
Постуральную устойчивость (в том числе, и определенную жесткость тела человека в условиях гравитации) обеспечивают постуральные рефлексы, которые бывают двух видов:
(1) познотонические рефлексы, которые ограничивают (по мере необходимости) число степеней свободы суставов за счет закрепощения тоническими мышцами. Так, позвоночник оказывается ограничен в подвижности паравертебральными мышцами; определенными мышцами ограничивается подвижность в тазобедренных, коленных и голеностопных суставах и атлантоокципитальном сочленении.
(2) установочные рефлексы: без установочных рефлексов закрепощенное тело человека, поставленное вертикально, упало бы. Этого не происходит, потому что при отклонении от вертикали срабатывают рецепторы вестибулярного аппарата и проприоцепторы суставов и мышц.
«Сенсорная информация» от вестибулярного аппарата поступают по нисходящим вестибулоспинальным путям к мышцам туловища и конечностей для восстановления утраченного равновесия; а также эта информация, вместе с информацией от проприоцептивной системы поступает по восходящим вестибулоцеребеллярным и спиноцеребеллярным путям в мозжечок, являющийся центром равновесия.
Оба компонента постурального контроля (постуральная устойчивость и постуральная ориентация) очень тесно взаимосвязаны. Любое изменение постуральной ориентации мгновенно влечет за собой смещение центра тяжести. Вместе с тем, и коррекция положения центра тяжести достигается за счет перемещения структур тела относительно друг друга, то есть за счет изменения позы. Следовательно, отклонение тела человека от вертикали дает важную информацию для восстановления утраченного равновесия (при этом функционирует преимущественно тоническая мускулатура), поэтому равновесие здорового
человека можно охарактеризовать как устойчивое неравновесие.
Таким образом, система постурального контроля складывается из двух подсистем. Первой подсистемой является мышечно-скелетная подсистема, которая характеризуется различной степенью выраженности степени свободы движений в суставах, свойствами тонических и фазических мышц, жесткостью, устойчивостью позвоночного столба, а также его эластичностью и гибкостью. Второй подсистемой является невральная подсистема.
Формы постурального контроля: (1) постуральный контроль спокойного стояния, (2) реактивный (в ответ на возмущения) или адаптивный контроль, (3) преднастройка позы, (4) произвольный контроль.
Постуральный контроль спокойного стояния (регуляция позы) осуществляется, прежде всего, антигравитационной мускулатурой (мышцами-разгибателями позвоночного столба, тазобедренных и коленных суставов), а также рефлексами на растяжение мышц передней и задней поверхности голени. Кроме этого, проприоцептивные сигналы от поверхностных и глубоких тактильных рецепторов подошвенной поверхности стоп, то есть информация о контакте стопы с опорой. В осуществлении функции равновесия важны: зрительная информация, информация от проприоцепторов сухожилий глазодвигательных мышц. Но наиболее значимыми являются проприоцепция и импульсация от рецепторов вестибулярного аппарата.
Но наиболее значимыми являются проприоцепция и импульсация от рецепторов вестибулярного аппарата.
Реактивный (или адаптивный) постуральный контроль представляет собой автоматическое изменение позы в ответ на нарушение равновесия. Это происходит при внезапной смене направления движения, при неожиданном столкновении с препятствием. В этот момент центр давления тела смещается к границе площади опоры, что вызывает реальную угрозу падения. Реактивный контроль заключается в восстановлении безопасного положения центра давления за счет изменения позы. Это достигается активацией нервно-мышечных синергий, главным образом, за счет обработки информации о линейных и угловых изменениях положения головы. Другие афферентные системы выполняют в этом случае важную, но вспомогательную роль. Реактивный постуральный контроль имеет более сложную организацию, так как сохранение равновесия в данном случае зависит, прежде всего, от выбора позной стратегии. Структурой, ответственной за выбор адекватных двигательных и позных синергий, являются базальные ганглии, специфической функцией которых является программирование последовательности включения мышечных синергий при внезапной потере равновесия.
Преднастройка (изменение) позы (предшествующая произвольному движению). Очень важная роль в запуске предшествующей движению позной преднастройки принадлежит промежуточным отделам мозжечка. Не исключается и участие моторных зон коры, поскольку в ней формируется окончательная программа произвольного движения. Основным фактором, определяющим включение позной преднастройки, является наличие у человека двигательного опыта или представлений о способе выполнения данного движения. Позная преднастройка является формой опережения, а реактивный позный контроль – форма обратной связи.
Произвольный позный (постуральный) контроль имеет место в усложненных условиях сохранения постурального равновесия, например, при необходимости преодолевать какое-либо препятствие при ограничении сенсорной информации. Это наиболее сложная, сознательно управляемая форма контроля, так как она предполагает наличие смысловой программы действия, формирующейся в ассоциативных зонах мозга, координационно-двигательные аспекты которой программируются при непосредственном участии базальных ганглиев и мозжечка, моторных зон коры головного мозга. Наиболее часто эта форма контроля запускается зрительным сигналом об изменении или усложнении условий для сохранения равновесия.
Это наиболее сложная, сознательно управляемая форма контроля, так как она предполагает наличие смысловой программы действия, формирующейся в ассоциативных зонах мозга, координационно-двигательные аспекты которой программируются при непосредственном участии базальных ганглиев и мозжечка, моторных зон коры головного мозга. Наиболее часто эта форма контроля запускается зрительным сигналом об изменении или усложнении условий для сохранения равновесия.
Постуральный контроль у детей с особенностями развития | Мама Особенного Ребенка
В общих чертах постуральный контроль можно описать как очень тонкую автоматическую способность удерживать равновесие при изменении положения тела в пространстве за счет работы постуральных мышц, которые расположены глубже остальных. Речь идет о длинной мышце шеи, повздошно-реберной, длинной мышце спины и других «разгибающихся» мышцах тела. Это практически все мышцы, крепящиеся к позвоночному столбу.
Т.е. постуральный контроль отвечает за поддержание позы и равновесие, которые обеспечивают движения. Их сложно отделить друг от друга, но изначально все-таки на первый план выступает сохранение вертикализации, а развитие целенаправленных движений несколько вторично. Если тело не вертикализировалось вовремя, то об остальном говорить не приходится.
В организации постурального контроля участвуют две системы: мышечно-скелетная, отвечающая как раз за работу мышц, суставов, жесткость позвоночного столба, а также невральная, в которой обрабатывается вся сенсорная информация (зрительная, двигательная, слуховая, тактильная и т.д.) и потом отправляется в мозжечок — центр равновесия.
Если ребенок неустойчив, плохо восстанавливает равновесие, с трудом меняет позы, неловок в движениях туловища и конечностей, плохо контролирует повороты головы/тела, хуже сохраняет линию взгляда, у него смещен центр тяжести, можно говорить о постуральных нарушениях и дефектных постуральных рефлексах, отвечающих за работу суставов, тонус тела и рецепторы вестибулярного аппарата.
Когда ребенок совсем маленький это может проявляться в том, что этапы физиологического развития задерживаются. Малыш позже переворачивается, садится, встает, ходит и т.д. По сути, вертикализация максимально нарушена и отодвигается на поздние сроки. Именно в этой области проявляются основные симптомы.
У Ани, как я уже писала, все эти ступени развития сместились на много месяцев вперед.
Удерживала голову — в 4,5 месяца;
перевернулась — в 7,5 месяцев;
села — в 10,5 месяцев;
поползла — в 1 год;
встала у опоры — в 1г. 3м.;
пошла (раскачиваясь и заваливаясь назад) — в 1г. 7м.
Нормально ходить Анюта начала ближе к 3 годам. Нормально — это не падая навзничь. Атаксические проявления оставались еще несколько лет. О них я писала в другой статье.
Ребенок с плохим постуральным контролем устанавливает очень слабую и ненадежную связь между отдельными структурами тела, между телом и окружающим его пространством. Если наблюдать за его нахождением в пространстве, складывается ощущение, что он не вписывается в него: промахивается мимо игрушки рукой, не может попасть ногой по мячу, плохо идет по ступенькам, не может удержать в руках мелкие предметы, падает на детских площадках и т.д.
Постуральные нарушения у Ани остаются сейчас. В чем это проявляется?
Неуклюжая ходьба. Она чаще спотыкается, теряет равновесие, топчется на месте, чтобы обдумать каждое отдельное движение. Если нужно совершить комплекс движений, дочка долго соображает, что к чему, и совершает их будто в замедленном ритме.
Это приводит к падениям и травмам. Она до сих пор натыкается на углы в квартире, падает с кровати, стула, спотыкается о камни и т.д. Руки и ноги у нее постоянно в синяках. Я несколько раз сталкивалась с тем, что меня подозревали в избиении ребенка. И многим доказать обратное нереально, если человек не знаком с подобным нарушением или предвзято к вам настроен. Синяки и шишки бывают не только на теле, но и на лбу.
Если Аню нечаянно толкнули, она почти в 100% случаев упадет, так как баланс тела в вертикальном положении нарушен больше всего. По моим наблюдениям, именно поэтому она всегда интуитивно ищет опору даже в тех движениях, где уже вполне переросла свои нарушения.
По моим наблюдениям, именно поэтому она всегда интуитивно ищет опору даже в тех движениях, где уже вполне переросла свои нарушения.
Слабость мускулатуры. Это приводит как раз к ограниченности многих движений. Более слабые мышцы, их гипотоничность ведут к тому, что ребенок хуже владеет своим телом, позже осваивает все навыки, в том числе учебные, требующие слаженной мышечной работы. Анюта до сих пор плохо контролирует степень нажима на карандаш или ручку. Она коряво раскрашивает, не прорисовывает детали, криво вырезает ножницами, не умеет склеивать детали. Некоторые виды творческой деятельности ей пока недоступны в силу неспособности именно физической, а не умственной.
Собственно, я уже сказала, что у детей с постуральными нарушениями страдают исполнительные функции, т.е. сознательная форма управления телом. Из-за сбитой смысловой программы действия хуже работает и крупная, и мелкая моторика. Анюта даже в быту обслуживает себя на уровне 4-летнего ребенка, а ей уже 7 лет! Ложка часто промахивается мимо рта, рука берет бутерброд криво, банан очищается неаккуратно, печенье крошится, белье в шкаф запихивается, а не укладывается стопочками, книжки кучей валятся на полку, носки до сих пор с трудом натягиваются на стопы… Это не лень. Это слабость мышц и вытекающие нарушения исполнительных функций. Анюта прекрасно понимает, что от нее хотят, но выполнить может лишь часть!
Еще я замечала, что ей сложно держать осанку даже в положении сидя. Ее спина настолько становится инертной, что голова опускается на уровне груди, а спина приобретает полукруглую форму. При напоминании держать осанку она выпрямляется, но, как только мыслями сей процесс перестает контролироваться, Аня опять становится похожа на вопросительный знак.
Ограничение подвижности часто ведет к социальной изоляции и страху перед новыми движениями. У Ани это очень заметно. Она боится сделать новое движение, упражнение, покататься на новой горке, откуда-то спрыгнуть. Дело в том, что единожды не справившись с чем-то и получив травму, ребенок начинает избегать любой ситуации, способной, по его мнению, привести к подобному результату. Это страх повторных падений.
Это страх повторных падений.
При подобном раскладе дети начинают избегать остальных ребятишек, т.к. не успевают за ними ни в подвижных, ни в творческих, ни в ролевых играх. С каждым годом социальная дистанция между особенным ребенком и обычными детками только растет.
Я не могу сказать, что у Ани есть умственные нарушения. Все специалисты подтверждают, что умственно она развита нормально. НО! Все-таки плохой постуральный контроль ограничивает и когнитивные функции. У дочки это выражено тем, что она дольше все обдумывает, дольше вникает в тонкости, ее логика работает замедленно, отчего стопорится весь процесс развития. Потому она и отстает в играх от своих сверстников.
Кстати, постуральные нарушения и часто вытекающая из этого атаксия могут быть обусловлены дисфункцией лобных долей. У Ани это точно есть, т.к. она отличается не только неуклюжей походкой, неустойчивостью тела при резких поворотах и изменениях положения, но и задержкой психического развития, общим недоразвитием речи (которое раньше квалифицировалось педагогами как сенсомоторная алалия), что как раз свидетельствует о слабом развитии лобных долей мозга.
Можно ли наладить постуральный контроль?
Все зависит от степени нарушения и сопутствующих диагнозов. У нас заметные результаты дают массажи, занятия с нейропсихологом, Томатис-терапия (я уже писала, что через ухо идет воздействие на вестибулярный аппарат), занятия с дефектологом, который определяет внимание на сенсорную интеграцию и, конечно, любые домашние развивающие занятия, направленные на восстановление двигательных функций.
Существуют десятки нетрадиционных методик. Я пишу лишь о том, с чем знакома лично. Если есть полезная информация на заданную тему, буду рада прочесть в комментариях!
Спасибо за внимание! Читайте также:
У Анюты третий диагноз ОНР. Что это такое?
Мы возобновили занятия у нейропсихолога. У Ани есть улучшения!
Что помогает Ане при ЗПР и других диагнозах. Наше лечение
Наше лечение
Ребенок с ЗПР, общая характеристика
Experimental Methods to Study Human Postural Control
Несколько шагов имеют решающее значение для выполнения этих экспериментов для изучения человека постурального контроля. Эти шаги связаны с правильным измерением сигналов и включают в себя: 1) Правильное выравнивание хвостовика лодыжки оси вращения к педалям, для правильного измерения крутящего момента лодыжки. 2) Правильная настройка диапазона искателей, чтобы убедиться, что они работают в их диапазоне и не насыщены во время экспериментов. 3) Измерение ЕМГ с хорошим качеством и минимальным перекрестным разговором. 4) Применение соответствующих возмущений, которые вызывают достаточные ответы, но не нарушают нормальный постуральный контроль. 5) Выбор соответствующей длины судебного разбирательства, на основе предполагаемого анализа, избегая при этом смещения тела и усталости. В дополнение к экспериментам, анализ также должен быть сделан тщательно. Для оценки внутренней жесткости из данных, полученных в механически возмущенных стоя, очень важно, чтобы выбрать длину внутренней реакции таким образом, чтобы обеспечить НЕТ рефлекторного крутящего момента (который начинается вскоре после всплеска активности в мышцах ТС) Включены. Кроме того, хотя многие исследования предполагали, что внутренняя жесткость не меняется в положении11,14,15, недавнее исследование показало, что важно учитывать модуляцию жесткости с изменения в крутящий момент лодыжки, связанные с постуральным итев23,32. Для определения FR динамического отношения от любого ввода к выходу, наиболее важным шагом является правильное оценка кросс-спектра и спектра мощности, выбрав длину окна и перекрытия, соответствующие длине записи.
Конструкция возмущений является важным шагом в человеческих постоянных экспериментов. Различные типы механических и визуальных возмущений были использованы для изучения постурального управления, учитывая, как угол опорной поверхности или угол поля зрения. К ним относятся мульти-син, низкопроходимый фильтрованный шум, псевдо-случайные тернази последовательность (PRTS) и другие3,9,10,12,18,24,31 ,33,34. Тем не менее, использование псевдо случайной двоичной последовательности (PRBS) выгодно для механических возмущений, потому что: 1) Для данной пиковой амплитуды, она обеспечивает самую высокую мощность в широком диапазоне частот, которые можно контролировать, выбрав скорость переключения3; 2) Это непредсказуемо, но повторяемый, что позволяет уменьшить шум путем усреднения; 3) Ввод PRBS с низкой абсолютной средней скоростью генерирует рефлекторные реакции, позволяя количественно определить рефлекторы в стоянии. Для зрительной системы импульсы шага не вызывают значительных постуральных реакций, поскольку зрительная система не может следить за быстрыми изменениями поля зрения. Кроме того, предсказуемые входы, такие как синусоиды с одной частотой, могут генерировать упреждающее поведение. Мультисиновые сигналы не эффективны для изучения зрительных реакций, потому что их быстрые и непрерывные изменения трудно следовать и может привести к тому, что субъекты заболеют. Сигналы PRTS широко используются для изучения зрительной системы в положении стоя, так как это информативный вход; движения поля зрения дискретны, а не непрерывны, и их скорость может контролироваться для генерации когерентных визуальных реакций. Хотя, PRTS выполняет хорошо, это ненулевой средний сигнал, который может вызвать нестационарных в почтовом контроле и делает идентификацию трудно. Таким образом, Ловушка была разработана для решения этой проблемы, которая является непредсказуемой, дискретной, и имеет нулевое среднее(рисунок 2B). Другим важным соображением при разработке экспериментов является амплитуда возмущений. Как правило, возмущения с низкими амплитудами должны быть использованы, когда цель состоит в том, чтобы выполнить линейный анализ и не отклоняться от лодыжки стратегии.
К ним относятся мульти-син, низкопроходимый фильтрованный шум, псевдо-случайные тернази последовательность (PRTS) и другие3,9,10,12,18,24,31 ,33,34. Тем не менее, использование псевдо случайной двоичной последовательности (PRBS) выгодно для механических возмущений, потому что: 1) Для данной пиковой амплитуды, она обеспечивает самую высокую мощность в широком диапазоне частот, которые можно контролировать, выбрав скорость переключения3; 2) Это непредсказуемо, но повторяемый, что позволяет уменьшить шум путем усреднения; 3) Ввод PRBS с низкой абсолютной средней скоростью генерирует рефлекторные реакции, позволяя количественно определить рефлекторы в стоянии. Для зрительной системы импульсы шага не вызывают значительных постуральных реакций, поскольку зрительная система не может следить за быстрыми изменениями поля зрения. Кроме того, предсказуемые входы, такие как синусоиды с одной частотой, могут генерировать упреждающее поведение. Мультисиновые сигналы не эффективны для изучения зрительных реакций, потому что их быстрые и непрерывные изменения трудно следовать и может привести к тому, что субъекты заболеют. Сигналы PRTS широко используются для изучения зрительной системы в положении стоя, так как это информативный вход; движения поля зрения дискретны, а не непрерывны, и их скорость может контролироваться для генерации когерентных визуальных реакций. Хотя, PRTS выполняет хорошо, это ненулевой средний сигнал, который может вызвать нестационарных в почтовом контроле и делает идентификацию трудно. Таким образом, Ловушка была разработана для решения этой проблемы, которая является непредсказуемой, дискретной, и имеет нулевое среднее(рисунок 2B). Другим важным соображением при разработке экспериментов является амплитуда возмущений. Как правило, возмущения с низкими амплитудами должны быть использованы, когда цель состоит в том, чтобы выполнить линейный анализ и не отклоняться от лодыжки стратегии. Достоверность лодыжки стратегии могут быть проверены аналитически35, и если Есть большие отклонения, которые могут быть порождены большей амплитуды возмущения, нелинейные методы анализа, в сопровождении многосегментных моделей тела в положении, может быть требуется36.
Достоверность лодыжки стратегии могут быть проверены аналитически35, и если Есть большие отклонения, которые могут быть порождены большей амплитуды возмущения, нелинейные методы анализа, в сопровождении многосегментных моделей тела в положении, может быть требуется36.
Еще одним соображением для проектирования возмущений является длина пробной версии, которая должна быть достаточно длинной, чтобы обеспечить надежную оценку параметров модели. Однако очень длительные испытания нежелательны, поскольку они могут привести к смещению субъекта ориентации тела, что приводит к нестационарности, что затрудняет системное моделирование и идентификацию. Длина пробной версии от 2 до 3 минут является оптимальной. Эта продолжительность судебного разбирательства, как правило, не приводит к усталости, при условии, что между судебными процессами обеспечивается достаточный период отдыха. Метод анализа также влияет на требуемую длину судебного разбирательства. Если используется линейный анализ с использованием функции реакции FR или импульса, то наименьшая частота интереса будет определять длину записи. Обратная длина окна равна минимальной частоте, поэтому, если будут изучены более низкие частоты, необходимо использовать более длинные окна. Кроме того, судебное разбирательство должно быть достаточно длительным, чтобы обеспечить достаточную усредненную для получения надежных спектральных оценок. Нелинейный анализ, как правило, потребует еще более длительных записей данных, поскольку нелинейные модели обычно имеют больше параметров, чем линейные модели.
Изучение постурального контроля человека требует выбора соответствующего метода идентификации. Параметрические и непараметрические методы линейной идентификации могут быть использованы для изучения постурального контроля10,12,18,19,20,28,31 ,37,38,39,40,41,42,43,44,45 ,46,47,48,49,50,51,52,53,54 . Непараметрическая идентификация,с использованием оценки FR, широко используется для изучения постурального контроля, потому что она хорошо подходит для идентификации данных, полученных в замкнутом состоянии стоя24 и требует немногих a-priori предположения (для деталей этогометодасм. 24 ). Наиболее часто используемый метод заключается в оценке FR замкнутой системы между внешним (механическим/сенсорным) возмущением и выходом (например, угол тела, крутящий момент лодыжки или емачку мышцы), который представляет собой комбинацию контроллера, растения и обратной связи. Для обеспечения физической значимости и изучения каждого компонента по отдельности, многие исследования использовали параметрическую модель замкнутого цикла системы и оценили параметры, которые соответствуют FR параметрической модели к расчетной чувствительности вывода10 ,18,31,37,38,39,40,41,42,43 ,44,45,46,47,48,49,50,51. Параметрическая идентификация,с другой стороны, предполагает, что ввод системы и выход связаны с некоторыми структурами модели с ограниченным числом параметров, известных a-priori. Метод ошибки прогнозирования используется для поиска параметров модели, которые минимизируют ошибку между измеренным выходом и прогнозом модели55. В отличие от моделей FR, где внешние возмущения должны быть измерены и использованы для анализа, эти методы могут быть применены непосредственно к любым двум сигналам, до тех пор, пока отдельная модель шума, которая адекватно параметризована, оценивается такжев 56. Это означает, что нет необходимости измерять внешние возмущения. Хотя, заказы модели должны быть определены a-priori, параметрические модели обычно имеют меньше параметров, чем модели FR и, следовательно, обеспечивают более надежные оценки параметров.
Непараметрическая идентификация,с использованием оценки FR, широко используется для изучения постурального контроля, потому что она хорошо подходит для идентификации данных, полученных в замкнутом состоянии стоя24 и требует немногих a-priori предположения (для деталей этогометодасм. 24 ). Наиболее часто используемый метод заключается в оценке FR замкнутой системы между внешним (механическим/сенсорным) возмущением и выходом (например, угол тела, крутящий момент лодыжки или емачку мышцы), который представляет собой комбинацию контроллера, растения и обратной связи. Для обеспечения физической значимости и изучения каждого компонента по отдельности, многие исследования использовали параметрическую модель замкнутого цикла системы и оценили параметры, которые соответствуют FR параметрической модели к расчетной чувствительности вывода10 ,18,31,37,38,39,40,41,42,43 ,44,45,46,47,48,49,50,51. Параметрическая идентификация,с другой стороны, предполагает, что ввод системы и выход связаны с некоторыми структурами модели с ограниченным числом параметров, известных a-priori. Метод ошибки прогнозирования используется для поиска параметров модели, которые минимизируют ошибку между измеренным выходом и прогнозом модели55. В отличие от моделей FR, где внешние возмущения должны быть измерены и использованы для анализа, эти методы могут быть применены непосредственно к любым двум сигналам, до тех пор, пока отдельная модель шума, которая адекватно параметризована, оценивается такжев 56. Это означает, что нет необходимости измерять внешние возмущения. Хотя, заказы модели должны быть определены a-priori, параметрические модели обычно имеют меньше параметров, чем модели FR и, следовательно, обеспечивают более надежные оценки параметров. Основным недостатком параметрической модели является то, что для получения объективных оценок параметров необходимо использовать правильную модель шума.
Основным недостатком параметрической модели является то, что для получения объективных оценок параметров необходимо использовать правильную модель шума.
Важным фактором в области постурального контроля человека является его замечательная адаптивность к новым экспериментальным и экологическим условиям. Это достигается за счет мультисенсорной интеграции, что означает, что ЦНС сочетает в себе информацию из соматосенсорных, визуальных и вестибулярных систем, в то время как она придает больший вес более точным (и менее переменным) сенсорным входам в любой экспериментальной условий для постурального контроля. Например, когда проприоцепция возмущена вращением ног, ЦНС больше полагается на визуальные и вестибулярные входы. Метод был разработан Peterka31 для количественной оценки мультисенсорной интеграции. Для постоянного эксперимента с конкретным внешним возмущением он определил FR замкнутой системы цикла, а затем установил к ней параметрическую модель (как это было уведомлялось в предыдущем пункте). Параметрическая модель включала в себя центральный контроль, ввод которого представлял собой взвешенную сумму входов из трех сенсорных систем; весы были использованы для обеспечения средств количественной оценки важности каждого сенсорного источника для постурального контроля, т.е. чем выше вес, тем более важным является сенсорный вход. Применение этого метода к экспериментальным данным показало, что возмущенная сенсорная система имеет меньший вес и меньшее значение из-за неточности ее ввода и, следовательно, вносит меньше в постуральный контроль31. Этот метод был использован, чтобы показать, как постуральный контроль также изменения в связи со старением и заболеваний38,39. Аналогичный подход может быть использован с нашим экспериментальным аппаратом, где механические или / и визуальные возмущения применяются для изучения роли и взаимодействия важных сенсорных систем в постуральном управлении.
Представленные методы имеют некоторые ограничения, поскольку экспериментальные и аналитические методы предназначены для изучения постурального контроля при использовании лодыжки. Таким образом, возмущения должны быть разработаны, чтобы избежать чрезмерного движения тела. Однако, когда возмущения большие или поверхность поддержки совместима, используется стратегия тазобедренного сустава, то есть как движения лодыжки и бедра являются значительными. Стратегия тазобедренного сустава характеризуется антифазным движением нижней и верхней части тела, которое специально произносится на частотах больше 1 Гц57. Изучение хип-стратегии требует моделирования тела, по крайней мере, с двумя ссылками, т.е. двойной перевернутой модели маятника.
Таким образом, возмущения должны быть разработаны, чтобы избежать чрезмерного движения тела. Однако, когда возмущения большие или поверхность поддержки совместима, используется стратегия тазобедренного сустава, то есть как движения лодыжки и бедра являются значительными. Стратегия тазобедренного сустава характеризуется антифазным движением нижней и верхней части тела, которое специально произносится на частотах больше 1 Гц57. Изучение хип-стратегии требует моделирования тела, по крайней мере, с двумя ссылками, т.е. двойной перевернутой модели маятника.
Subscription Required. Please recommend JoVE to your librarian.
Значение системы оценки «SATCo»* и новый подход для развития контроля туловища, предплечий и головы
* «SATCo» — Segmental Assessment of Trunk Control (Сегментарная оценка контроля туловища) это современная и очень ценная система оценки, формально впервые представленная работой Доктора Пенелопи Бутлер и её командой в 2010 году (https://www.ncbi.nlm.nih.gov/pmc/articles/PMC2927393/ ) и, сравнительно недавно, выдвинутая, для активного использования в мировой практике.
Система SATCo позволяет увеличить эффективность и качество терапии в направлении развития контроля положения и движения тела, в частности, туловища.
Предыдущие исследования и работы связанные с направлением развития баланса и контроля туловища рассматривали все туловище как единое целое, игнорируя тот факт, что туловище состоит из многих мышечных и скелетных субъединиц. Этот старый подход не учитывает нервно-мышечную координацию, которая должна быть достигнута, чтобы сидеть или стоять независимо, контролируя свое туловище, включая координацию многих крестцовых, поясничных, брюшных, грудных и шейных мышц, используемых для поддержания равновесия. Лечение, направленное на улучшение контроля туловища в целом, а не на выявление и решение проблем в различных подразделах туловища, может способствовать возникновению трудностей в улучшении контроля туловища и равновесия сидя, которые наблюдаются у Клиентов с более тяжелой двигательной инвалидностью.
Лечение, направленное на улучшение контроля туловища в целом, а не на выявление и решение проблем в различных подразделах туловища, может способствовать возникновению трудностей в улучшении контроля туловища и равновесия сидя, которые наблюдаются у Клиентов с более тяжелой двигательной инвалидностью.
Более современный инструмент оценки степени контроля туловища был разработан, рассматривая многие субъединицы, которые должны быть, скоординированы для достижения контроля, при сидении или в состоянии стоя, включая тесты статического, активного и реактивного контроля. Он основан на биомеханике управления вертикальной осанкой туловища. Процедура используя SATCo проверяет контроль туловища ребенка, по мере того как измеряющий специалист постепенно изменяет уровень поддержки туловища от высокого уровня поддержки в плечевом поясе до оценки шейного (головного) контроля, через поддержку в подмышечных впадинах (верхний грудной контроль), нижней лопатке (средний грудной контроль), нижних ребрах (Нижний грудной контроль), ниже ребер (верхний поясничный контроль), тазу (Нижний поясничный контроль) и, наконец, без поддержки, чтобы измерить полный контроль туловища. Этот инструмент оценки имеет преимущество перед ранее упомянутыми инструментами оценки всех трех аспектов контроля туловищем: 1. статический (или стационарный) контроль 2. активный (или упреждающий) контроль и 3. реактивный контроль (поддержание или восстановление контроля туловища после угрозы равновесия, вызванной резким толчком).
Этот тест, теперь называемый сегментарной оценкой контроля туловища (SATCo), позволяет более глубоко проанализировать способности ребенка контролировать туловище и, в свою очередь, это позволяет по-новому отнестись к лечению недостатков контроля туловища. Традиционные старые инструменты, которые оценивают туловище как единое целое, неизбежно приведут к методам лечения, которые рассматривают туловище как единое целое. Такой тест, как SATCo, позволяет точно определить уровень, на котором присутствуют трудности управления туловищем, и приводит к подходу «уровень за уровнем» к разработке управления туловищем.
Оценка, выбор адаптивного оборудования и стратегии внедрения для лечебных, реабилитационных и образовательных учреждений и дома
SATCo это ценный инструмент, помогающий клиницистам определить, где именно клиент нуждается в поддержке туловища для выполнения задач или участия в различных индивидуальных или групповых занятиях. Работа Батлер и др. (2010) 1 продемонстрировала обоснованность данного инструмента и его способность обнаруживать уровни слабости туловища и проблемы постурального контроля. Этот подход к оценке контроля туловища представляет собой сдвиг парадигмы; во-первых, понимание того, что ствол состоит из нескольких уровней, а затем признание необходимости более целенаправленной поддержки для развития постурального контроля, необходимого для функционирования.
Клиницисты могут ошибаться относительно постурального контроля своего клиента и того, где этот контроль на самом деле находится, из-за концепции открытых и закрытых цепей (Saavedra et al., 2015). Способность выполнять функциональные задачи зависит от способности клиента эффективно и результативно использовать открытые и закрытые цепи движения. Чем выше по туловищу клиент теряет постуральный контроль, тем быстрее он замыкает цепь для поддержания постурального контроля, что в свою очередь ограничивает его способность эффективно использовать голову, руки и ноги. Примером этого может быть ребенок, сидящий на скамейке, используя обе руки на скамейке для поддержания осанки. Кажется, что ребенок имеет постуральный контроль, чтобы свободно сидеть; однако этот ребенок не может использовать обе руки для участия в деятельности, потому что ей нужны руки, чтобы поддерживать свою позу. То же самое верно и для Клиента находящегося в вертикализаторе, который использует поддержку головы, чтобы держать голову; закрытие цепи таким образом ограничивает способность студента использовать свои глаза, чтобы визуально участвовать в занятиях или общении со сверстником. Для клинициста наблюдение за клиентом и использование им принципов открытой и закрытой цепи является ключом к обозначению конкретной области потери постурального контроля и помогает принять решение о том, как решить ее с помощью опор. Поддержка может быть выполнена вручную или с помощью адаптивного оборудования в зависимости от (1) того, где на туловище возникает ослабление, (2) для какой деятельности необходим этот контроль и (3) уникальных потребностей клиента.
Поддержка может быть выполнена вручную или с помощью адаптивного оборудования в зависимости от (1) того, где на туловище возникает ослабление, (2) для какой деятельности необходим этот контроль и (3) уникальных потребностей клиента.
Нейтральное положение таза является ключом к постуральному контролю с использованием принципов SATCo. Это позволяет клиенту выровнять позу в наиболее выгодном положении, возможном для функционирования, а также позволяет клиницисту видеть, где контроль теряется во время тестирования по системе SATCo. Поддержание нейтрального положения таза в положении стоя и сидя имеет первостепенное значение при реализации любого адаптивного оборудования для терапии проблем постурального контроля. Поэтому, адаптивное оборудование для сидения или вертикализации используя принципы SATCo должны обеспечивать возможность фиксации таза в нейтральное положение, если Клиент не может его обеспечить самостоятельно. Отличными примерами такого оборудования являются Мобильный Стендер Рифтон или Пейсер Рифтон в положении стоя и Адаптивное сидение Рифтон, в положении сидя:
Рассмотрим конкретный случай Клиента, который сидит на сидении во время группового занятия. Действия во время занятия могут потребовать, чтобы она протянула руку и коснулась экрана или изображения, активировала переключатель или удержала флажок. В этом конкретном случае тестирование SATCo показало, что ребенок потерял постуральный контроль на среднем грудном уровне, который находится на среднем уровне грудной клетки. Для того чтобы ребенок мог сохранять постуральный контроль и использовать свои руки для касания экрана или удержания флага, ему нужна поддержка на этом среднем грудном уровне. Как врач-клиницист, как бы вы вмешались, чтобы ребенок мог участвовать в групповом занятии и участвовать в обучении?
Вмешательство должно включать в себя сначала позиционирование пациента с нейтральным положением таза, используя систему поддержки таза, как, на пример, ту которая предоставляется Адаптивным сидением Рифтон, или систему обвязки, добавленную к скамейке или другому адаптивному сидению.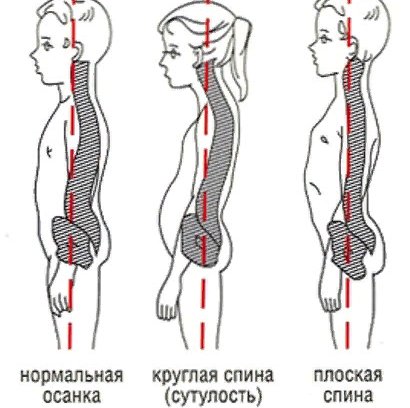 Дополнительная поддержка для смягчения потери контроля в средней части грудной клетки может исходить от (1) терапевта, поддерживающего Клиента сзади руками на нижнем конце Средних ребер после того, как таз правильно закреплен, (2) Креплениями туловища. Теперь возможно использование верхней конечности.
Дополнительная поддержка для смягчения потери контроля в средней части грудной клетки может исходить от (1) терапевта, поддерживающего Клиента сзади руками на нижнем конце Средних ребер после того, как таз правильно закреплен, (2) Креплениями туловища. Теперь возможно использование верхней конечности.
Как терапевт, внимательно наблюдайте за Вашим Клиентом, в то время как он выполняет задачу для того чтобы настроить позиционирование тела для оптимального функционирования (для этого особенно хорошо подходит специальное оборудование которое позволяет изменять регулировки не вынимая Клиента). Возможно, Вам потребуется переместить поддержки и крепления вверх или вниз, чтобы клиент мог максимизировать свое участие. Эти же стратегии могут быть использованы дома и применены к адаптивному сидению, (даже обычному стулу используя ремешки если это реально относительно возможностей и потребностей Клиента) или к вертикализатору.
Для ребенка, у которого нет контроля над головой в соответствии с тестированием SATCo, применяются те же самые концепции: начните с нейтрального положения таза и примените опоры высоко на туловище. В этом случае ручная поддержка может быть более трудной, а механические поддержки (используя специальное оборудование) более уместны. Имейте в виду, что необходимая поддержка может варьироваться в зависимости от различных задач, которые ребенок может выполнять в школе, лечебном учреждении или заниматься дома (сложность и изменчивость задачи и окружающей среды потребует тщательного наблюдения для обеспечения оптимального участия и успеха). Примером этого может являться Клиент, сидящий в адаптивном кресле в школе во время перекуса, и кормление пальцем, по сравнению с сидящим на том же стуле в кафетерии и использующим ложку или вилку, чтобы научиться есть самостоятельно со сверстниками.
SATCo очень эффективен для достижения лучшего понимания постуральных проблем ваших клиентов и как средство для осуществления эффективного вмешательства.
Новый подход к развитию постурального контроля, используя концепцию и систему “SATCo”
SATCo дает новые перспективы в увеличении эффективности и продуктивности постурального развития у Клиентов со средним или выраженным уровнем инвалидности. Данная перспектива ставит задачу перед терапевтами, смотреть на все тело с точки зрения открытых и закрытых цепей, для того чтобы сделать правильную оценку и нацелиться на работу над определенными сегментами туловища.
Данная перспектива ставит задачу перед терапевтами, смотреть на все тело с точки зрения открытых и закрытых цепей, для того чтобы сделать правильную оценку и нацелиться на работу над определенными сегментами туловища.
При правильном использовании SATCo и наличии соответствующего оборудования (или креативными альтернативами которыми реабилитологи так известны!) результаты работы могут быть занчительно более высокими и долгосрочными.
SATCo позволяет определить уровень, на туловище, до которого требуется фиксация тела для того чтобы более эффективно развивать постуральный контроль и функциональные возможности движения туловища, рук и головы. Тем самым SATCo дало начало новому подходу для физического и функционального развития.
Новый подход начинается с оценки используя SATCo. Терапевт стабилизирует определенные сегменты туловища, в то время как ребенка просят двигать предплечьями, шеей и головой. Оценивающий терапевт постепенно перемещается вверх по туловищу по семи сегментам для определения где именно контроль требует наибольшей работы.
При проведении такой оценки, терапевт должен осознавать концепцию открытых и закрытых цепей – по сути, как человек располагает определенные части тела для минимизации потребности в напряжении мышц над определенными другими частями. «Закрытые» цепи (как на пример, стоя облокотившись на стенку или сидя с локтями на столе, поддерживая голову руками) позволяют нам «обойти» потребность контроля над мышцами. Это концепция, над которой мы даже не задумываемся. Это, так же, то что делают Клиенты с моторными нарушениями для компенсации дефицита в моторном и постуральном контроле.
Доктрор Батлер отметила что, хотя это легко игнорируется, очень важно, чтобы терапевты хорошо осознавали концепцию цепей, поскольку крайне важно, чтобы цепи оставались открытыми при целевых занятиях для развития контроля тела, предплечий и головы.
Д. Беллоуз (PT, MHS, PCS) объяснила что после использования оценки SATCo терапевты могут изолировать сегменты, которые требуют наибольшей работы, и со временем, прогрессировать от этого уровня для увеличения контроля над всем туловищем, верхними конечностями и головой. Идея, по её словам, заключается в том, чтобы стабилизировать все области тела, которые не рассматриваются при целенаправленной работе. Оптимальным способом стабилизация такого рода является использование соответствующего позиционного оборудования, но творческие терапевты конечно могут придумать альтернативные способы, когда доступ к оборудованию не представляется возможным.
Идея, по её словам, заключается в том, чтобы стабилизировать все области тела, которые не рассматриваются при целенаправленной работе. Оптимальным способом стабилизация такого рода является использование соответствующего позиционного оборудования, но творческие терапевты конечно могут придумать альтернативные способы, когда доступ к оборудованию не представляется возможным.
Идея сегментированных занятий (тренировок) заключается в том, что когда тело «изолировано», Клиент не пытается контролировать множество не контролируемых элементов а только работает над контролем суставов контроль над которыми ему наиболее требуется. Полученные клинические доказательства, кроме демонстрации полученных результатов, показали то что они сохраняются и в последующем, постоянно, после тренировок.
Заключение:
Использование системы оценки SATCo, вместо того чтобы рассматривать туловище как единое целое, дает возможность установить уровень на котором Клиент теряет контроль. Используя эту информацию, мы можем направлять стратегии позиционирования и терапевтического вмешательства на определенном уровне, на котором Клиент функционирует. Позиционирование таким образом и направленные развивающие занятия более эффективно и долгосрочно улучшают и развивают функциональные возможности а так же, позволяют Клиенту более активно взаимодействовать с окружающей средой, участвовать в индивидуальных или групповых занятиях, учиться в классе. Это выглядит по разному для разных Клиентов но может включать:
- Удержание головы в поднятом состоянии на длительное время
- Осознанный контроль шеи для поворота головой
- Улучшение визуальных навыков
- Улучшение разговорных и прочих коммуникативных навыков
- Улучшение контроля верхних конечностей
Это лишь некоторые примеры возможных достижений. Сегментальная поддержка и принципы данного подхода можно использовать как в положении сидя, так и стоя.
Данная публикация является редактированным совмещением нескольких статей, презентаций и докладов с добавлениями и под редакцией – Pankaj Kuswhaha, Rehab and Medical, Stockport, UK. Основные авторы: Dr P. Butler, Ms S. Saavedra PT, Dr V. Santamaria, S. Secere PT, D. Bellows PT, Jocelyn Jarcinsky PT.
Основные авторы: Dr P. Butler, Ms S. Saavedra PT, Dr V. Santamaria, S. Secere PT, D. Bellows PT, Jocelyn Jarcinsky PT.
Постуральный контроль и равновесие. Диагностика и лечение позвоночника
Физкультура
Существуют две системы, отвечающие за поддержание стабильности или равновесия тела:
• Одной из них является автоматическая система постуральной регуляции. Органы равновесия (полукружные каналы) и зрения и механорецепторы работают совместно для подачи в центральную нервную систему необходимой информации для регуляции деятельности соответствующих мышц.
• Другая система основана на сознательных умственных процессах, отвечающих за обеспечение необходимых действий в определенной ситуации. Данные процессы основаны на предыдущем опыте, зафиксированном центральной нервной системой.
Полукружные каналы
Полукружные каналы расположены во внутреннем ухе. Его три структуры в форме кольца, по одному в каждой плоскости пространства, заполнены жидкостью. При изменении положения головы полукружные каналы срабатывают как нивелиры, используемые в строительстве, указывая угол наклона в трех плоскостях: горизонтально (Х), вертикально (Y) и в глубину (Z).
Зрение
Глаза получают информацию обо всех положениях тела относительно горизонтальной поверхности и окружающих предметов. Если мы стоим на одной ноге с закрытыми глазами, мы можем оценить важность данной системы в поддержании равновесия.
Проприоцептивная система
Проприоцептивная система, называемая «шестым чувством», содержит бесконечное количество нервных рецепторов (механорецепторов), расположенных в суставах, мышцах и сухожилиях. Данные рецепторы отвечают за сбор информации о пространственном положении тела (суставные рецепторы) и изменении напряжения и длины мышечно-сухожильных соединений.
Данные рецепторы отвечают за сбор информации о пространственном положении тела (суставные рецепторы) и изменении напряжения и длины мышечно-сухожильных соединений.
Постуральная стабилизация
В выполнение какого-либо действия вовлечены три различные группы мышц: двигательные, отвечающие за выполнение движения, стабилизирующие, отвечающие за равновесное расположение частей тела относительно друг друга, и постуральные, чья функция заключается в поддержании вертикального положения тела и преодолении силы тяжести.
Постуральные мышцы являются в первую очередь самыми глубокими: длинная мышца шеи, прямые передние мышцы, затылочная мышца, паравертебральные мышцы, подвздошно-реберная, длинная мышца спины и пояснично-подвздошная мышца. Они предназначены для того, чтобы, сокращаясь в течение долгого периода времени, поддерживать «фундамент», отталкиваясь от которого действуют двигательные и стабилизирующие мышцы. При отсутствии соответствующей трофики глубокие мышцы относительно легко устают, вызывая перегрузку поверхностных мышц (выполняющих часть их работы), более подготовленных к точным движениям, чем к длительному сокращению.
Постуральные, двигательные и стабилизирующие мышцы
Для того чтобы понять взаимосвязь между двигательными и стабилизирующими мышцами, можно обратиться к модели простого механизма, основанного на сгибании локтевого сустава.
При совершении данного движения некоторые мышцы, влияющие на положение плечевого сустава, должны быть задействованы для стабилизации данного сустава и предупреждения смещения руки кзади (А).
На следующем рисунке (В) можно увидеть положение руки без стабилизации плеча.
Стабилизирующая, постуральная и двигательная активность мускулатуры чрезвычайно сложна при осуществлении повседневной деятельности. Эта активность влияет на многочисленные суставы, постоянно регулирует тонус, заставляя мышцы сокращаться синергично относительно друг друга в зависимости от положения тела и требований данной ситуации.
Действие мышц при опоре на одну ногу
• Отводящие мышцы слева изначально являются двигательными мышцами. Они перемещают таз и все туловище при наклоне, а затем выполняют функцию стабилизаторов для поддержания положения (1).
• Отводящие мышцы справа для поддержания равновесия тела перемещают ногу в сторону, противоположную наклону туловища (2).
• Брюшные мышцы, квадратная поясничная мышца, паравертебральные мышцы, подвздошно-реберная мышца и длинная мышца спины справа поддерживают позвоночник прямо, удерживая его от наклона влево (2). Кроме того, эти мышцы поддерживают положение таза, действуя вместе с отводящими мышцами слева (1).
• Затылочные и шейные мышцы преимущественно слева стабилизируют положение головы и шейных позвонков (4).
• Отведение рук, за которое ответственны дельтовидные и надостные мышцы (5), помогает поддерживать равновесие тела.
• Обе руки, в свою очередь, стабилизируются мышцами спины (верхняя порция трапециевидной – 4, ромбовидные – 6, поднимающая лопатку – 7) в подвешенном, не расслабленном положении, необходимом для быстрой реакции на изменение тонуса и движения верхних конечностей для удержания равновесия.
• Дорсальные мышцы предплечья поддерживают кисть на одной линии со всей рукой (8).
• Мышцы, расположенные ниже колена, принимают активное участие в контроле равновесия (9) благодаря постоянной регуляции и координации сокращений (если встать на одну ногу, можно почувствовать действие этих мышц и постоянные движения лодыжки).
1. Отводящие мышцы слева
2. Отводящие мышцы справа
3. Брюшные мышцы, квадратная поясничная мышца и паравертебральные мышцы
4. Затылочные и шейные мышцы
5. Дельтовидные и надостные мышцы
6. Ромбовидные мышцы
7. Мышца, поднимающая лопатку
8. Дорсальные мышцы предплечья
Дорсальные мышцы предплечья
9. Мышцы ноги
DoctorSPB.ru — информационно-справочный портал о медицинеDoctorSPB.ru — информационно-справочный портал о медицине, здоровье и красоте. Методы лечения ВИЧ,СПИД и гепатита,обзор фармакологических препаратов.Диагностика венерических заболеваний. На сайте размещены учебные медицинские фильмы,медицинские книги и методические пособия, рефераты и историй болезней для студентов и практикующих врачей. Задачей медицинской генетики является выявление и профилактика наследственных болезней. Генетика человека изучает явления наследственности и изменчивости в популяциях людей, особенности наследования нормальных и патологических признаков, зависимость заболевания от генетической предрасположенности и факторов среды.Читать полностью… Для диагностики острого инфаркта миокарда довольно широко использовалось определение в крови концентрации миоглобина. Специфичным лабораторным тестом острого инфаркта миокарда является определение МВ-фракции КФК. Любые кардиохирургические вмешательства, включая коронароангиографию, катетеризацию полостей сердца и электроимпульсную терапию, как правило, сопровождаются кратковременным подъемом активности МВ-фракции КФК. Читать полностью… Болезни печени сопровождаются рядом лабораторных синдромов. При анализе результатов биохимического исследования у больных с заболеваниями печени целесообразно выделять четыре лабораторных синдрома, каждый из которых в известной степени соответствует определенным морфологическим и функциональным изменениям в органе: цитолитический синдром, мезенхимально-воспалительный синдром, холестатический синдром (синдом холестаза), синдром малой печеночно-клеточной недостаточности. Обычно в каждом конкретном случае заболевания имеет место сочетание нескольких биохимических синдромов. Читать полностью.  .. ..В настоящее время продолжается интенсивный поиск новых препаратов, обладающих анксиолитическим действием и вместе с тем более безопасных и эффективных, чем существующие лекарственные средства. Транквилизаторы – это особая группа психотропных средств, которые уменьшают или устраняют страх, тревогу, беспокойство, раздражительность, эмоциональную напряженность, выраженность эмоциональной насыщенности переживаний, то есть оказывают антиневротическое действие. Читать полностью… Боль в животе практически во всех случаях достаточно серьезное явление, к которому нельзя относиться безразлично. При заболеваниях желудка боли беспокоят в верхней половине живота. Боль обуславливается повышением секреторной и моторной функции. К болевым синдромам относится «гиперсекреторный невроз», описанный Райхманом. для него характерна повторная рвота с большим количеством кислого содержимого в сочетании с резкой болью. Чаще приступы возникают натощак и ночью, могут сопровождаться развитием гипохлоремической тетании, напоминают картину гипергатросуккореи, характерную для пилородуоденальной локализации язвенной болезни. Читать полностью… Внутривенное введение сверхвысоких, ударных доз глюкокортикостероидных гормонов, или пульс-терапия, получило наибольшее распространение в медицине критических состояний – септический шок, астматический статус, острый инфаркт миокарда с развитием синдрома Дресслера, отек Квинке, отек мозга, синдром Лайела, рассеянный склероз и др. Стандартным считается применение пульс-терапии для профилактики и купирования криза отторжения трансплантата. Именно успешное применение пульс-терапии у больных с кризом отторжения, в основе которого лежит целый ряд иммунных нарушений, послужило основой для использования пульс-терапии у больных с аутоиммунными ревматическими заболеваниями. Читать полностью… Основным элементом дегенерации межпозвонкового диска является уменьшение количества протеингликанов.  Происходит фрагментация аггреканов, потеря глюкозаминогликанов,
что приводит к падению осмотического давления и, как следствие, дегидратации диска. Однако даже в дегенерированных дисках клетки сохраняют способность к продуцированию
нормальных аггреканов. Одной из основных причин дегенерации межпозвонкового диска является нарушение адекватного питания его клеточных элементов.
In vitro было показано, что клетки межпозвонкового диска достаточно чувствительны к дефициту кислорода, глюкозы и изменению pH. Происходит фрагментация аггреканов, потеря глюкозаминогликанов,
что приводит к падению осмотического давления и, как следствие, дегидратации диска. Однако даже в дегенерированных дисках клетки сохраняют способность к продуцированию
нормальных аггреканов. Одной из основных причин дегенерации межпозвонкового диска является нарушение адекватного питания его клеточных элементов.
In vitro было показано, что клетки межпозвонкового диска достаточно чувствительны к дефициту кислорода, глюкозы и изменению pH. Читать полностью… Дисбиозы – это микроэкологические нарушения, которые выражаются в нарушениях состава и функций нормальной микрофлоры. Состояние здоровья человека во многом определяется его микрофлорой. Именно поэтому современные стоматологи уделяют такое внимание проблеме дисбиоза и дисбактериоза полости рта. В полости рта и глотке человека встречается более 300 видов микробов. Читать полностью… Это лечение больных сифилисом с установленным и подтвержденным диагнозом. Арсенал применяемых противосифилитических препаратов включает: (1) антибиотики, которые в свою очередь подразделяются на антибиотики выбора и антибиотики резерва, а также (2) препараты висмута и йода, которые применяют значительно реже. Поскольку лечение сифилиса проводится почти исключительно антибиотиками, то до начала терапии необходимо собрать аллергологический анамнез в отношении их переносимости, а перед первыми инъекциями назначить антигистаминные средства. Читать полностью… Снижение массы тела не является самостоятельным диагнозом – этот симптом лишь свидетельствует о происходящем в организме патологическом процессе. Вместе с массой тела человек теряет и компенсаторные возможности, становясь уязвимым к любым неблагоприятным воздействиям окружающей среды. Поэтому любой случай похудения заслуживает адекватного внимания и лечения. Читать полностью.  .. ..Pin-Up onlayn kazino ən populyar oyun portalı halına gəldi və https://dreamhomeworks.co/ veb saytında fəxrlə yer aldı ki, resurs rəhbərliyi oyunçular üçün rahat şəraitlər yaratdı. Читать полностью… |
Почему важен контроль осанки?
Заметили ли вы, что некоторые дети сутулиться в креслах и быстро утомляются, когда занимаются чем-то, сидя за столом? Если это так, то вы, вероятно, смотрите на ребенка, у которого слабая сила корпуса, что влияет на его / ее способность сохранять контроль над позой.
Контроль осанки означает способность ребенка принимать и сохранять вертикальную позу, сидя без поддержки. Ребенок, у которого есть надлежащий контроль осанки, может сохранять сидячее положение без усталости.Контроль осанки важен, потому что он обеспечивает основу, которая позволяет рукам и ногам двигаться плавно. Ребенку, которому трудно сидеть с хорошей осанкой, будет сложно писать, делать поделки или выполнять какие-либо настольные действия, требующие точности мелкой моторики, поскольку ребенку нужно будет направить все свое внимание на то, чтобы убедиться, что он / она не будет упасть со стула!
Классические признаки плохого контроля осанки включают:
- Сидение на стуле в согнутом положении
- Опираясь на верхнюю часть стола для поддержки сидя
- Частые падения в сидячем положении
- Проблемы с оборудованием игровых площадок, таким как горки, шесты, пилы и качели
- Ходьба с широкой опорой и сидение в широкоугольном положении W
- Боязнь грубых действий
Мероприятия по улучшению постурального контроля:
- Игра в игры типа «подбрасывание и ловля» в позе «Высокие колени», которая похожа на положение на коленях с поднятым дном и прямыми бедрами и коленями.
- Прогулки на тачке — отличный способ улучшить силу кора, измерить, как далеко вы можете пройти! Еще один интересный способ поиграть — бросить фрисби, а затем тачку к нему! Бросьте его 3-4 раза и решите, какой из них был дальше всего.

- Потянитесь, кладя ребенка на животик, попытайтесь оторвать руки и ноги от пола ладонями вперед и ладонями вниз, представьте, что вы самолет!
- Свернуться в клубок, положив ребенка на спину, скрестить руки на груди и прижать колени к груди, приподняв голову; не подпирайте колени руками.
- Играйте в толкание ногами со сверстниками: сидя лицом друг к другу, поставьте ноги напротив ног друзей и оттолкнитесь, или сядьте спиной к спине со связанными руками и потяните и попытайтесь занять положение стоя.
- Поощряйте ребенка опробовать новое оборудование на игровой площадке. Качели, обезьяньи брусья, горки и шесты — все это упражнения, которые увеличивают силу кора, а затем помогают улучшить контроль осанки.
Границы | Контроль осанки человека
Введение
Жизнь развивалась в присутствии силы тяжести, и с древней Греции до наших дней было признано, что осанка поддерживается тоническими мышечными сокращениями, действующими против силы тяжести и стабилизирующими положение сегментов тела.Греческий врач Гален из Пергама был, вероятно, первым, кто ввел понятие мышечного тонуса в своей работе «De motu musculorum» (Гален, 1549). Из клинических наблюдений давно известно, что поражение центральной нервной системы может приводить к выраженным изменениям осанки. Систематические экспериментальные исследования физиологических механизмов постуральной регуляции были начаты только столетие назад Шеррингтоном (1906, 1915) и получили дальнейшее развитие у Магнуса (Magnus and de Klein, 1912; Magnus, 1924) и Радемейкера (1931).Для понимания механизмов контроля баланса использовались различные биомеханические и нейрофизиологические подходы (Horak and Macpherson, 1995).
Мы начинаем этот обзор с влиятельной схемы управления вертикальной позой, основанной на идее перевернутого маятника и наличия колебаний центра давления (ЦД) как важной меры устойчивости позы. В упрощенной модели вертикального положения человека с перевернутым маятником центр массы тела (ЦМ) является единственной контролируемой переменной (Winter et al. , 2003). При спокойном стоянии CoP колеблется по обе стороны от CoM, чтобы удерживать его в довольно постоянном положении между двумя ногами (рис. 1C). Поскольку центр масс тела (ЦМ) расположен относительно высоко (в туловище, на ~ 1 м выше щиколоток, что определяет длину перевернутого маятника), а основание опоры относительно невелико, поза по своей природе нестабильна. Соответственно, можно сделать вывод, что чем выше расположение CoM, тем больше колебания CoP. Однако это утверждение является упрощением и вводит в заблуждение.Например, на рисунке 1 показаны типичные примеры колебаний центра давления во время спокойного стояния у кошки, собаки и человека. Обратите внимание на аналогичные колебания ЦО (~ 1-2 см), несмотря на существенные различия в высоте центра масс над опорой. Сравнимое (~ 1 см CoP) раскачивание тела наблюдалось также у лошадей (Clayton and Nauwelaerts, 2014) и у крыс (~ 2 см CoP), обученных стоять на двух ногах (Sato et al., 2015). Поэтому простая схема «чем ниже CoM, тем меньше колебания CoP» обманчива или, по крайней мере, не может быть распространена на животных разного размера.Кроме того, амплитуда колебаний CoP намного меньше, чем фактическая база опоры (схематически изображенная на рисунке 1, средние панели), и, вероятно, обеспечит стабильность, даже если она будет больше.
, 2003). При спокойном стоянии CoP колеблется по обе стороны от CoM, чтобы удерживать его в довольно постоянном положении между двумя ногами (рис. 1C). Поскольку центр масс тела (ЦМ) расположен относительно высоко (в туловище, на ~ 1 м выше щиколоток, что определяет длину перевернутого маятника), а основание опоры относительно невелико, поза по своей природе нестабильна. Соответственно, можно сделать вывод, что чем выше расположение CoM, тем больше колебания CoP. Однако это утверждение является упрощением и вводит в заблуждение.Например, на рисунке 1 показаны типичные примеры колебаний центра давления во время спокойного стояния у кошки, собаки и человека. Обратите внимание на аналогичные колебания ЦО (~ 1-2 см), несмотря на существенные различия в высоте центра масс над опорой. Сравнимое (~ 1 см CoP) раскачивание тела наблюдалось также у лошадей (Clayton and Nauwelaerts, 2014) и у крыс (~ 2 см CoP), обученных стоять на двух ногах (Sato et al., 2015). Поэтому простая схема «чем ниже CoM, тем меньше колебания CoP» обманчива или, по крайней мере, не может быть распространена на животных разного размера.Кроме того, амплитуда колебаний CoP намного меньше, чем фактическая база опоры (схематически изображенная на рисунке 1, средние панели), и, вероятно, обеспечит стабильность, даже если она будет больше.
Рисунок 1 . Колебания центра давления (ЦД) при спокойном стоянии у кошки (A) , собаки (B) и человека (C) . Примеры трассировок CoP (внизу) адаптированы из MacPherson and Horak (2012) с разрешения в (A) , перерисованы из Brookhart et al.(1965) в (B) и модифицировано из Ivanenko et al. (1999) в (C) . Размер основания опоры схематично изображен на средних панелях. Обратите внимание на сопоставимые колебания ЦМ (~ 2 см) у четвероногих относительно человека, несмотря на 5-кратную разницу в высоте центра масс над опорой.
Таким образом, важно подчеркнуть, что простые биомеханические соображения могут объяснить поведение позы лишь до некоторой степени. Кроме того, колебания ЦС отражают только оперативный уровень контроля позы, связанный со стабилизацией ориентации определенных постуральных сегментов тела.Однако каковы принципы, определяющие привычные конфигурации позы и тоническую мышечную активность вдоль оси тела? Постуральный тонус (часто связанный с антигравитационной поддержкой) представляет собой тоническую активацию мышц, чтобы обеспечить определенное положение тела и создать силу, отталкивающуюся от земли, чтобы конечности оставались вытянутыми. Привычная поза варьируется у разных животных и может включать вытянутые конечности или полусогнутую позу. Антигравитационная поддержка у людей частично обеспечивается пассивными силами костей в суставах, растянутых связках и мышцах, но также требует активного сокращения в разгибателях нижних конечностей, туловища и шеи.Управление тонусом позы непросто и требует специализированных нейронных схем. Требуется подробная информация об основных нейронных цепях, а также о лежащих в основе клеточных процессах, обеспечивающих длительную мышечную силу и жесткость. Стоит отметить, что осанка у разных людей определяется как индивидуальной морфологией, так и специфической низкоуровневой мышечной активностью, на которую также могут существенно влиять различные патологические состояния. Интеграция нескольких сенсорных и моторных областей развивалась на протяжении миллионов лет эволюции жизни с целью обеспечения точного регулирования ориентации тела в гравитационном поле.
Кроме того, колебания ЦС отражают только оперативный уровень контроля позы, связанный со стабилизацией ориентации определенных постуральных сегментов тела.Однако каковы принципы, определяющие привычные конфигурации позы и тоническую мышечную активность вдоль оси тела? Постуральный тонус (часто связанный с антигравитационной поддержкой) представляет собой тоническую активацию мышц, чтобы обеспечить определенное положение тела и создать силу, отталкивающуюся от земли, чтобы конечности оставались вытянутыми. Привычная поза варьируется у разных животных и может включать вытянутые конечности или полусогнутую позу. Антигравитационная поддержка у людей частично обеспечивается пассивными силами костей в суставах, растянутых связках и мышцах, но также требует активного сокращения в разгибателях нижних конечностей, туловища и шеи.Управление тонусом позы непросто и требует специализированных нейронных схем. Требуется подробная информация об основных нейронных цепях, а также о лежащих в основе клеточных процессах, обеспечивающих длительную мышечную силу и жесткость. Стоит отметить, что осанка у разных людей определяется как индивидуальной морфологией, так и специфической низкоуровневой мышечной активностью, на которую также могут существенно влиять различные патологические состояния. Интеграция нескольких сенсорных и моторных областей развивалась на протяжении миллионов лет эволюции жизни с целью обеспечения точного регулирования ориентации тела в гравитационном поле.
Здесь мы рассматриваем экспериментальные проблемы, которые влияют на то, как мы определяем и рассматриваем механизмы мышечного тонуса и постуральной регуляции. В первом разделе мы кратко обсуждаем структурную и функциональную сложность постуральных мышц, потому что любое размышление о мышечном тонусе и его контроле должно учитывать знание уникальной структуры и свойств скелетных мышц. В следующих разделах мы обсуждаем идеи и подходы, которые представляют или представляют важные концептуальные основы для исследования контроля за позой человека.
Структурно-функциональная сложность постуральных скелетных мышц
Структура и функция скелетных мышц позволяют выполнять широкий спектр действий, от быстрого создания силы и движения до длительного сохранения ориентации сегментов тела относительно силы тяжести. Кроме того, специфическая для задачи активация функционально различных типов мышечных волокон, составляющих данную мышцу, может обеспечить богатый набор мышечных сокращений и выработку энергии.Постуральный тонус обычно рассматривается как мышечное напряжение низкого уровня, наблюдаемое как в дистальных, так и в проксимальных (туловище и шея) скелетных мышцах. Тем не менее, нельзя размышлять о постуральном тонусе, рассматривая только нервный сигнал от подкорковых и корковых структур. Недавние биохимические и биомеханические данные заставили серьезно переоценить структурную и функциональную сложность мышц (Knight, 2016). В частности, теория скользящих нитей для мышечного сокращения была расширена за счет включения регуляторных и цитоскелетных белков, которые отвечают за вязкоупругие свойства мышц и экономию производства силы — ключевые периферические вклады в постуральную регуляцию.
Теория скользящих филаментов основана на модели, в которой актиновые и миозиновые филаменты скользят друг мимо друга, и была предложена в 1954 году независимо двумя группами (Huxley and Hanson, 1954; Huxley and Niedergerke, 1954). Хью Хаксли формально предложил механизм скольжения нити, который получил название поперечно-мостовой модели. Согласно его модели, скольжение филаментов происходит за счет циклического прикрепления и отсоединения миозина от актиновых филаментов. Сокращение происходит, когда миозин тянет актиновую нить к центру полосы А, отделяется от актина и создает силу (удар) для связывания со следующей молекулой актина.Однако современные взгляды на механизм сокращения мышц включают три скользящих филамента, а именно актин, миозин и тайтин (Knight, 2016). Важно отметить, что, помимо связей с сарколеммой через Т-канальцы и саркоплазматический ретикулум, саркомеры связаны другими внесаркомерными структурами цитоскелета на Z-диске и M-полосе. Эта структура претерпевает обратимые осевые и поперечные конформационные изменения в сжимающемся саркомере. Саркомерная структура цитоскелета играет ключевую роль в теории скользящих филаментов (Gautel and Djinović-Carugo, 2016).
Эта структура претерпевает обратимые осевые и поперечные конформационные изменения в сжимающемся саркомере. Саркомерная структура цитоскелета играет ключевую роль в теории скользящих филаментов (Gautel and Djinović-Carugo, 2016).
В контексте постуральной функции скелетных мышц и стабилизации сегментов тела, эластические свойства скелетной мускулатуры и напряжение мышц тесно связаны с регуляторными белками и белками цитоскелета. Несмотря на то, что постуральная мышечная активность довольно мала, стоит подчеркнуть, что любая поза не является пассивной, и специфическая малая активность мышц шеи, туловища и конечностей определяет напряжение покоя, осевой тонус, индивидуальные позы, выражение лица и т. Д. (Jankovic, 2003 ; Гурфинкель и др., 2006; Райт и др., 2007; Caneiro et al., 2010). Длительное поддержание постуральной мышечной активности (минуты или даже часы) связано с низкими энергетическими затратами. Постуральная активность обычно задействует медленные мышечные волокна, которые более устойчивы к утомлению. Как управлять этим механизмом во время позы и небольших движений, которые часто присутствуют при поддержании позы? В дополнение к избирательной активации соответствующих мышечных волокон, малоизученный, но интригующий аспект постурального мышечного тонуса включает в себя механизмы эластичности мышц, увеличения силы и сохранения энергии.
Например, статическая жесткость зависит от кальций-зависимой жесткости активированных волокон, независимо от образования поперечных мостиков, и тайтин, по-видимому, обладает всеми характеристиками, необходимыми для учета свойств статической жесткости (Colombini et al., 2016). Увеличение силы также может быть результатом взаимодействия между эластичным элементом в мышечных саркомерах и поперечными перемычками, которые, в свою очередь, взаимодействуют с эластичными элементами, регулируя их длину и жесткость. Мышечная модель, основанная на гипотезе извилистой нити, может предсказать увеличение остаточной силы в мышцах (Nishikawa, 2016). Гигантский белковый небулин является одним из важных регуляторных белков, и было предложено использовать его в качестве «молекулярного регулятора» для определения длины тонких нитей, которые играют роль во многих клеточных процессах, включая регуляцию мышечного сокращения, вязкоупругие свойства, Z- формирование диска и сборка миофибрилл (Chu et al., 2016). Взаимодействие между тайтином и небулином все еще не определено. Наконец, зависимые от употребления изменения в составе мышечных волокон (Hoppeler, 2016) и прогрессирующее уменьшение времени сокращения мышц в процессе развития ребенка наряду с созреванием центральной нервной системы, контролирующей позу и движения (Dayanidhi et al., 2013) отражают функциональные преимущества такого постоянного созревания и указывают на важную роль фенотипической пластичности мышц. Вышеупомянутые темы традиционно игнорировались, хотя прогресс в выяснении молекулярных механизмов сокращения мышц открывает новые возможности для понимания важных периферийных факторов, влияющих на постуральную регуляцию и пластичность мышц.
Гигантский белковый небулин является одним из важных регуляторных белков, и было предложено использовать его в качестве «молекулярного регулятора» для определения длины тонких нитей, которые играют роль во многих клеточных процессах, включая регуляцию мышечного сокращения, вязкоупругие свойства, Z- формирование диска и сборка миофибрилл (Chu et al., 2016). Взаимодействие между тайтином и небулином все еще не определено. Наконец, зависимые от употребления изменения в составе мышечных волокон (Hoppeler, 2016) и прогрессирующее уменьшение времени сокращения мышц в процессе развития ребенка наряду с созреванием центральной нервной системы, контролирующей позу и движения (Dayanidhi et al., 2013) отражают функциональные преимущества такого постоянного созревания и указывают на важную роль фенотипической пластичности мышц. Вышеупомянутые темы традиционно игнорировались, хотя прогресс в выяснении молекулярных механизмов сокращения мышц открывает новые возможности для понимания важных периферийных факторов, влияющих на постуральную регуляцию и пластичность мышц.
Концептуальные основы и подходы к исследованию постурального контроля
Вертикальное двуногое положение традиционно описывается как зависящее от сенсорных (зрительных, вестибулярных и соматосенсорных) сигналов, обеспечивающих постуральное равновесие и правильное выравнивание сегментов тела по отношению к силе тяжести.Природа мультисенсорных взаимодействий была предметом множества исследований. С концептуальной точки зрения ниже мы рассмотрим три мифа о постуральной регуляции, которые оказали большое влияние на многие экспериментальные исследования и математические модели управления позой человека: (1) система контроля осанки является линейной, (2) контроль осанки определяется рефлексы, и (3) контроль позы — это контроль равновесия.
Нелинейные свойства системы контроля осанки
Небольшие движения сопровождают поддержание любой позы.Обычно, если человеческая осанка нестабильна, колебания сегментов тела не превышают 1–2 ° движений суставов, а колебания ЦС составляют около 1–2 см. Тот факт, что осцилляции осанки малы, подтверждает предположение о том, что система является линейной в ограниченном диапазоне движений, и, следовательно, можно применять линейные вычислительные модели и анализ (Winter et al., 2003; Mergner, 2007; Kiemel et al., 2008; Асслендер, Петерка, 2014). Хотя это предположение до некоторой степени справедливо, и многие исследования предоставили очень важную информацию о стратегиях осанки и вкладе различных сенсорных сигналов в контроль баланса, следует иметь в виду, что существует также существенная нелинейность в системе контроля осанки, а именно: часто упускается из виду.
Тот факт, что осцилляции осанки малы, подтверждает предположение о том, что система является линейной в ограниченном диапазоне движений, и, следовательно, можно применять линейные вычислительные модели и анализ (Winter et al., 2003; Mergner, 2007; Kiemel et al., 2008; Асслендер, Петерка, 2014). Хотя это предположение до некоторой степени справедливо, и многие исследования предоставили очень важную информацию о стратегиях осанки и вкладе различных сенсорных сигналов в контроль баланса, следует иметь в виду, что существует также существенная нелинейность в системе контроля осанки, а именно: часто упускается из виду.
Во-первых, некоторая нелинейность существует уже на уровне мышц, так как их устойчивость к небольшим угловым возмущениям (~ 1 °, соответствует примерно 1% изменениям длины мышечных волокон, так называемая жесткость на короткие расстояния , ”Rack and Westbury, 1974) намного выше, чем сопротивление более сильным возмущениям. Даже несмотря на то, что жесткости активных мышц голени на коротких дистанциях может быть недостаточно для полной компенсации раскачивания тела во время спокойного стояния (Morasso and Schieppati, 1999; Loram et al., 2007), его вклад определенно существенен (Gurfinkel et al., 1995). Тиксотропия скелетных мышц (Gurfinkel et al., 1989a) дополнительно способствует увеличению жесткости мышц в зависимости от времени для длительных постуральных движений. Действительно, компонент жесткости на коротком расстоянии меньше в периоды сильного постурального колебания. Таким образом, наблюдается значительное снижение (до 43%) внутренней жесткости голеностопного сустава в условиях повышенного базового раскачивания (Sakanaka et al., 2016), что свидетельствует о значительном влиянии истории раскачивания.Интрафузальные волокна мышечных веретен также демонстрируют тиксотропное поведение, что подразумевает усиление проприоцепции, связанное с анамнезом (Proske et al., 1993). В целом, игнорирование нелинейной зависимости жесткости голеностопного сустава от величины раскачивания может привести к серьезной неверной интерпретации результатов экспериментов, в которых используются механические возмущения или сенсорные манипуляции, такие как закрытие глаз, подвижные или нестабильные опорные поверхности, привязка к раскачиванию и т. Д. ( Loram et al., 2007).
Д. ( Loram et al., 2007).
Во-вторых, поскольку осцилляции осанки малы, внутри тела происходят значительные нелинейные перераспределения внутренних смещений мышечных волокон, сухожилий и мягких тканей.Например, из-за податливости ахиллова сухожилия наблюдается парадоксальное укорачивание камбаловидной и икроножной мышц, когда тело наклоняется вперед, и удлинение, когда тело возвращается, оставляя неопределенной постуральную роль многочисленных веретен икроножных мышц в обнаружении колебаний тела (Loram и др., 2004). Кроме того, контроль равновесия и внутренних смещений (мышечных волокон, связок и мягких тканей) не ограничивается дистальными суставами. Например, нарушения осанки могут возникать в результате дыхательных движений грудной клетки и живота и должны компенсироваться движением нижних конечностей и таза (Hodges et al., 2002). Кроме того, для стабилизации позы требуется постоянная активность осевых мышц для стабилизации туловища (и головы) и, при необходимости, для компенсации движений дистальных частей тела. Наконец, человеческая стопа при спокойном стоянии подвергается значительным деформациям из-за небольших смещений СоМ и деформаций мягких тканей и свода стопы. Стоит подчеркнуть, что вертикальные колебания пяточной кости (и передней части стопы) примерно на 0,5 мм, наблюдаемые при спокойном стоянии у здоровых взрослых людей (Gurfinkel et al., 1994) производят наклон тела примерно на 0,5 ° (смещения КП на 0,7 см) даже при отсутствии смещений голеностопного сустава. Ожидается, что у маленьких детей эти деформации и их влияние на контроль осанки будут еще больше, поскольку стопа ребенка претерпевает значительные изменения формы и мягких тканей подошвы в процессе развития (например, наличие жировой подушечки под подошвенной поверхностью стопы. у младенцев), когда ребенок начинает стоять и ходить. Более того, развитие костной структуры продольной дуги начинается только через ~ 1 год после рождения и продолжается до 5 лет (Straus, 1926; Maier, 1961).Постуральная активность многочисленных внутренних мышц стопы (которая, как правило, не регистрируется в исследованиях осанки) дополнительно способствует пластичности стопы человека.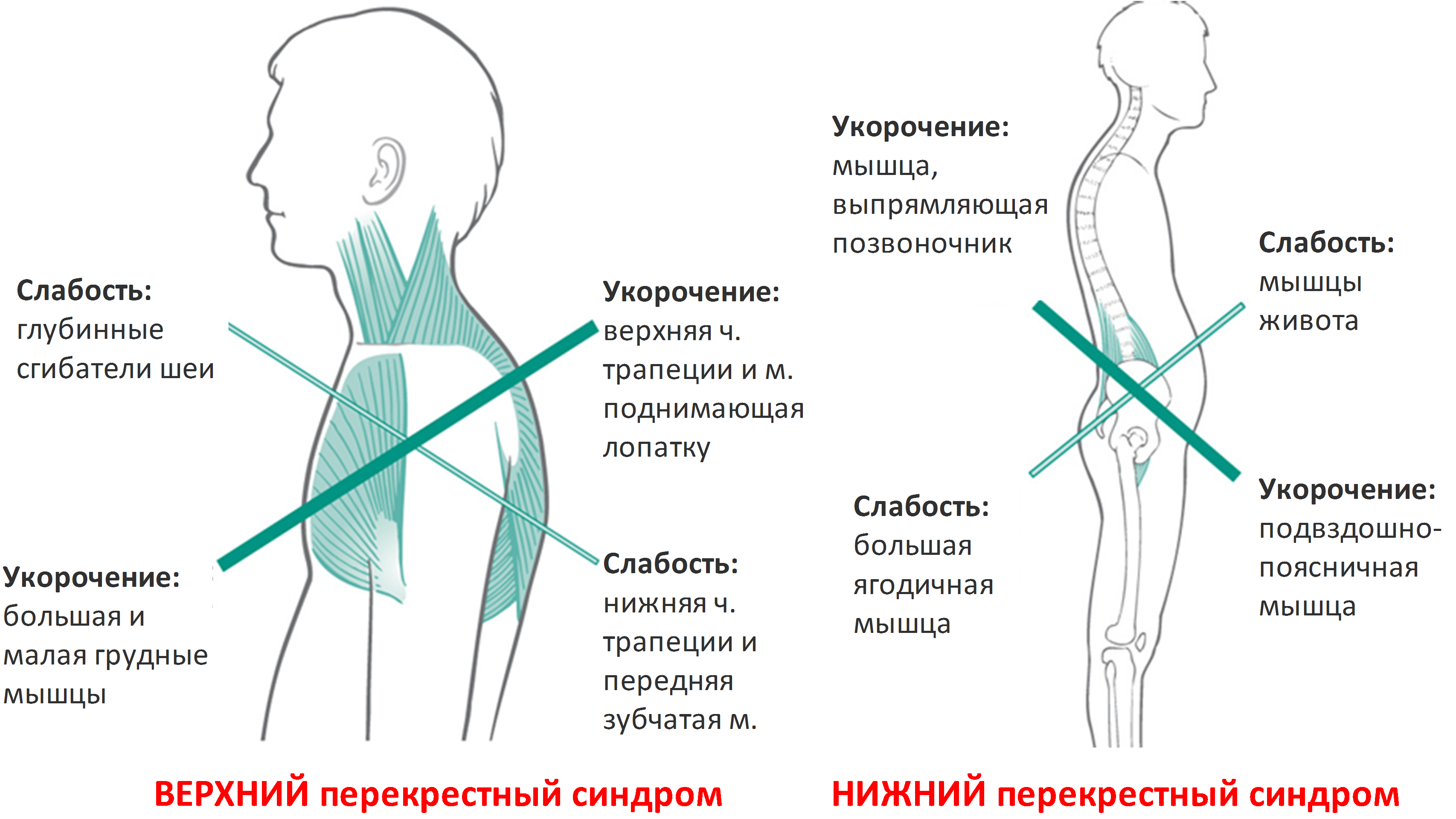 Также есть большие индивидуальные различия в деформациях стопы. Эти деформации приводят к большим ошибкам в измеренных изменениях угла голеностопного сустава, а даже незначительные локальные деформации стопы вызывают заметные направленные постуральные реакции (Gurfinkel et al., 1994; Wright et al., 2012). Однако многие постуральные исследования, как правило, сосредоточены на простом шарнирном действии голеностопного сустава (Gatev et al., 1999; Масани и др., 2003; Винтер и др., 2003; Мергнер, 2007).
Также есть большие индивидуальные различия в деформациях стопы. Эти деформации приводят к большим ошибкам в измеренных изменениях угла голеностопного сустава, а даже незначительные локальные деформации стопы вызывают заметные направленные постуральные реакции (Gurfinkel et al., 1994; Wright et al., 2012). Однако многие постуральные исследования, как правило, сосредоточены на простом шарнирном действии голеностопного сустава (Gatev et al., 1999; Масани и др., 2003; Винтер и др., 2003; Мергнер, 2007).
Обработка колебаний CoP подразумевает некоторую степень нелинейности. Контроль вертикальной позы во время спокойного стояния часто исследовался путем количественной оценки спонтанного постурального колебания в областях смещения, скорости и частоты. Тем не менее, анализ и интерпретация результатов следует проводить осторожно, поскольку методика обработки данных может повлиять на структуру изменчивости ЦС (Rhea et al., 2015). Кроме того, сходные амплитуды колебаний ЦС у разных животных (рис. 1) поднимают важный вопрос об их нормировании на рост, массу тела и размер основания опоры. Может ли это отражать эволюционно принятый сенсорный порог для контроля постурального колебания? Действительно, несмотря на различия в размерах тела, проприоцептивные пороги (для мышечных веретен, суставов и рецепторов нагрузки), скорости нервной проводимости и типы мышечных волокон у наземных млекопитающих схожи, что позволяет предположить, что простое масштабирование размеров не может применяться при сравнении сенсомоторной контроль между видами (More et al., 2010). Каким бы ни был точный механизм сопоставимых колебаний ЦО (рис. 1), вклад, вероятно, будет иметь как механический, так и нервный факторы (Gatev et al., 1999; Masani et al., 2003; Winter et al., 2003; Di Giulio et al., 2009; Симоно, Тисдейл, 2015). Эти соображения также важны для исследований развития. Например, колебания ЦС подобны или больше (но никогда не меньше) у маленьких детей по сравнению с взрослыми людьми, несмотря на более чем 2-кратную разницу в росте (Oba et al.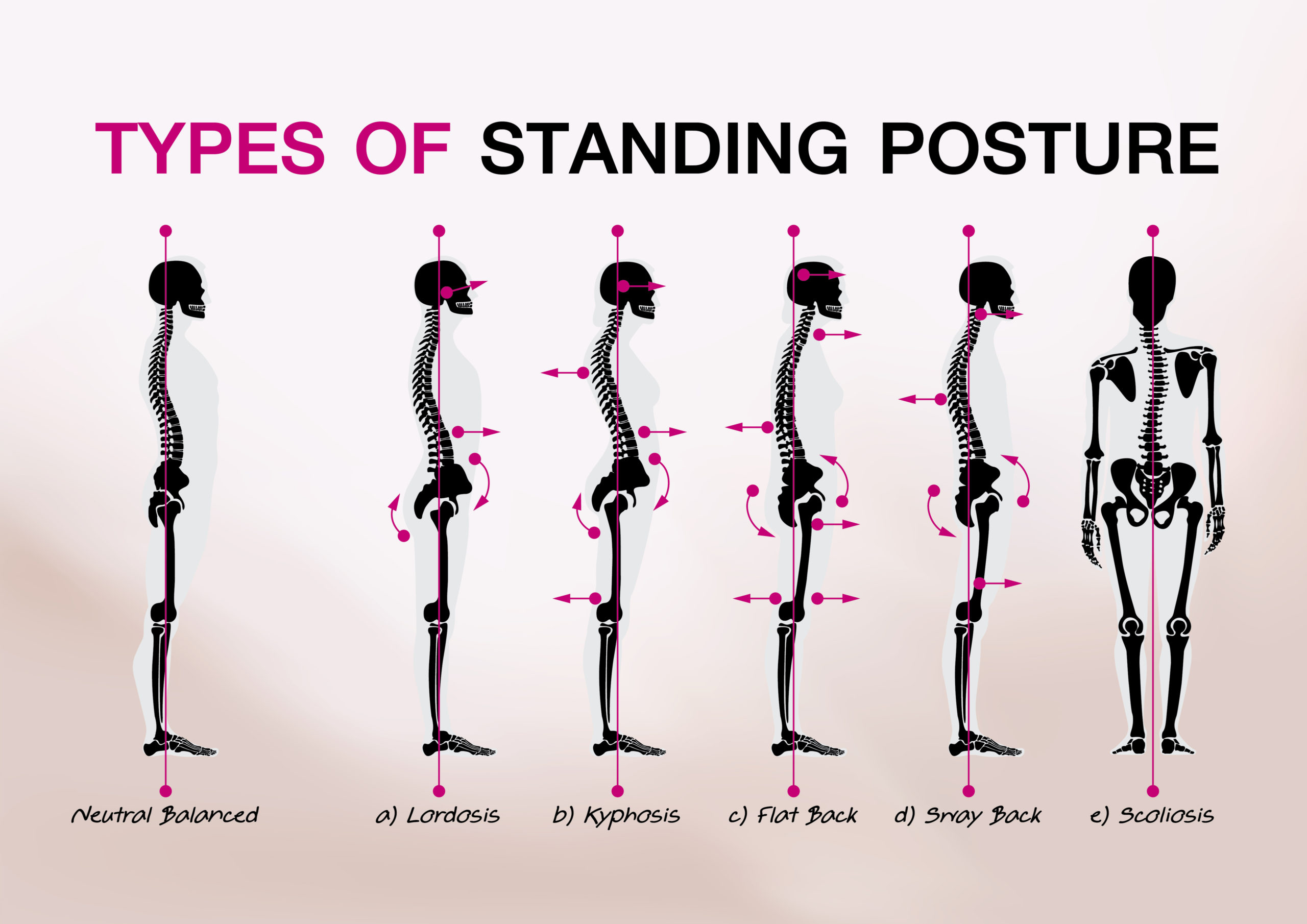 , 2015). В некоторой степени они могут быть объяснены развитием у детей устойчивости позы. Однако нам неизвестен квант колебаний ЦО, связанный с нестабильностью, и какая пропорция может быть скорректирована с помощью «неизвестной» процедуры нормировки. Другими словами, мы не уверены в том, следует ли и каким образом нормализовать амплитуду ЦС по росту для одного и того же животного в разном возрасте развития.
, 2015). В некоторой степени они могут быть объяснены развитием у детей устойчивости позы. Однако нам неизвестен квант колебаний ЦО, связанный с нестабильностью, и какая пропорция может быть скорректирована с помощью «неизвестной» процедуры нормировки. Другими словами, мы не уверены в том, следует ли и каким образом нормализовать амплитуду ЦС по росту для одного и того же животного в разном возрасте развития.
Существуют также другие нелинейные свойства сенсомоторной системы, в том числе пороги (например,g., для вестибулярной стимуляции), задержки проприоцептивной обратной связи и нервно-мышечной задержки производства силы. Нелинейная геометрия скелетно-мышечных связей (например, зависимость моментного плеча мышц от угла сустава) вносит свой вклад в нелинейные свойства сенсомоторной системы, хотя этот тип нелинейности более заметен во время относительно больших движений или постуральных движений. возмущения или при изменении позы. Мы не будем здесь рассматривать многочисленные постуральные модели и будем ссылаться на другие статьи, связанные со стратегией нелинейного управления, включая взрывоподобную активацию мышц, особенно наблюдаемую в нестабильных условиях.Было даже высказано предположение, что прерывистое управление разомкнутым контуром может быть подходящим решением для борьбы с временными задержками обратной связи, моторным шумом и вычислительно-мышечной экономией (Loram et al., 2011). Смена парадигм в будущих экспериментальных или модельных исследованиях может быть связана с развитием нелинейных подходов (Loram et al., 2011; Nomura et al., 2013; Funato et al., 2016), хотя сложность модели может ценою понимания. Эти ограничения приводят к необходимому компромиссу между использованием линейных подходов и более сложных моделей осанки.Тем не менее, даже если мы для простоты применяем линейные вычисления (например, Kiemel et al., 2008; Assländer and Peterka, 2014), мы должны иметь в виду значительную нелинейность в нервно-мышечном контроле позы.
Контроль осанки как совокупность постуральных рефлексов
Ранние постуральные исследования делали акцент на рефлекторной природе постуральных механизмов и приводили различные важные примеры статических постуральных реакций (Магнус, 1924; Робертс, 1978). Идея рефлексов растяжения, сенсорной (проприоцептивной, зрительной и вестибулярной) обратной связи и ее нарушения при различных формах патологии спинного мозга, ствола мозга и мозжечка в сочетании с разработанной позднее концепцией серворегуляции сыграла важную роль в оценке и моделировании. контроля осанки человека.
Идея рефлексов растяжения, сенсорной (проприоцептивной, зрительной и вестибулярной) обратной связи и ее нарушения при различных формах патологии спинного мозга, ствола мозга и мозжечка в сочетании с разработанной позднее концепцией серворегуляции сыграла важную роль в оценке и моделировании. контроля осанки человека.
С другой стороны, было понято, что понятие постуральных рефлексов довольно ограничено, чтобы учесть фактическую сложность контроля позы, которая включает упреждающие или упреждающие корректировки, контекстно-зависимые сенсомоторные (или «рефлекторные») модуляции, постуральное тело схема и интеграция позы и движений (Massion, 1994). Примечательной иллюстрацией постуральной схемы тела является модуляция автоматических постуральных реакций (например, в ответ на гальваническую вестибулярную стимуляцию, вибрацию мышц или постуральное возмущение) в соответствии с иллюзорным, а не реальным положением головы или сегментов тела (Gurfinkel, 1994). ).Существует несколько техник, позволяющих искусственно вызвать диссоциацию между реальной и воспринимаемой конфигурацией тела: вызывая проприоцептивные иллюзии, используя феномен «возврата» субъективного положения головы в нейтральное положение после длительного поворота или гипнотическое внушение. Все эти техники показывают сходное влияние на пространственно-ориентированные постуральные реакции на сенсорную стимуляцию. Изменения направления взгляда также могут модулировать постуральные реакции (Иваненко и др., 1999), что согласуется с супраспинальными или когнитивными влияниями на контроль позы, вероятно, потому, что взгляд представляет собой важную опорную систему для внутренней модели пространственной ориентации.Таким образом, тот факт, что автоматические постуральные реакции осуществляются в соответствии с внутренней репрезентацией схемы тела (Попов и др., 1986; Сметанин и др., 1988; Гурфинкель, 1994), указывает на то, что они служат не только для сознательного восприятия положения, но и это также основа для планирования и реализации двигательной активности. Контроль баланса как во время стояния, так и во время движений зависит от сложного взаимодействия физиологических механизмов, обработки сенсорной информации на высоком уровне в соответствии со схемой постурального тела, а также от ожиданий, целей, когнитивных факторов и предшествующего опыта человека.Элементы схемы тела существуют уже на уровне спинного мозга и вносят вклад в обработку сенсорной информации и постуральных реакций (Fukson et al., 1980; Windhorst, 1996; Poppele and Bosco, 2003). Понятие схемы тела привлекло внимание в широком контексте современного моторного контроля для понимания адаптируемости рефлекторной модуляции, ряда процессов, таких как оценка состояния, прогнозирование, обучение, а также для преодоления разрыва между когнитивными и моторными функциями (Gurfinkel, 1994). ; Маравита, Ирики, 2004; Виндхорст, 2007; Пирсон, Грамлих, 2010; Иваненко и др., 2011; Макферсон и Горак, 2012; Херцфельд и Шадмер, 2014).
В целом, контроль позы больше не считается одной системой или данным набором равновесных рефлексов, а скорее моторным навыком (Horak and Macpherson, 1995). Многие исследования сосредоточены на количественной оценке усиления рефлексов конкретных нервных путей, таких как рефлекс Хоффмана, местных рефлексов растяжения в отдельных суставах, моторных вызванных потенциалов и т. Д., Или применении определенного теста на равновесие. Они предоставляют знания о возбудимости этих путей в конкретных условиях.Однако представление о том, что за контроль позы отвечают несколько путей или центров в мозге, весьма ограничивает наши способности оценивать риски падения и улучшать равновесие. Кроме того, корковое вовлечение высокого уровня увеличивается по мере увеличения постуральных проблем или требований реактивного контроля (Ouchi et al., 1999; Solopova et al., 2003; Varghese et al., 2015). С точки зрения диагностики и реабилитации, « необходимо оценить многие системы, чтобы понять, что не так с балансом человека» (Horak, 2006).
Контроль осанки и равновесия
Во многих статьях по контролю осанки обычно утверждается, что сенсорная информация от соматосенсорной, вестибулярной и зрительной систем объединяется для поддержания равновесия (Fitzpatrick and McCloskey, 1994; Blouin et al., 2007; Mergner, 2007; Assländer and Peterka, 2014). ; Chiba et al., 2016). Соответственно, большая часть последовательных исследований, посвященных постуральному равновесию, изучает, как сенсорные входы повторно взвешиваются или как нейронные стратегии меняются в различных ситуациях для контроля баланса и постуральных реакций на возмущения (Nashner, 1976; Ivanenko et al., 1997; Jeka et al., 2004; Швейгарт и Мергнер, 2008; Нардоне и Шиппати, 2010; Симоно и Тисдейл, 2015; Balestrucci et al., 2017). Однако система контроля позы должна решать две задачи одновременно: одна задает распределение тонической мышечной активности («поза»), а другая предназначена для компенсации внутренних или внешних возмущений («равновесие»). Эквивалентны ли эти две задачи?
Начнем с того, что управление движением и поддержание фиксированной позы конечности после движения (удерживание части тела в месте назначения) включает различные нервные цепи в стволе головного мозга, мозжечке, моторной коре, гиппокампе и т. Д.(Шадмер, 2017). Например, многие нейроны первичной моторной коры, которые выражают связанную с нагрузкой активность, задействованы исключительно во время либо только позы, либо только движения, то есть они по-разному реагируют на временные и постоянные нагрузки, прикладываемые во время позы (Kurtzer et al., 2005; Herter et al., др., 2009). Было высказано предположение, что необходимость наличия «цепи удержания» могла возникнуть из-за необходимости поддерживать постоянное «сенсорное состояние», в то время как контуры, отвечающие за перемещение части тела, изменяют ее сенсорное состояние.Поскольку две задачи (движение и неподвижность) по своей сути взаимосвязаны, между этими контурами также существует перекрытие и взаимодействие. Тем не менее они существенно различаются. Нейрофизиологические данные по различным модальностям, касающимся контроля взгляда, движений головы, движений рук, позы и локомоций, показывают, что отдельные интернейроны и мотонейроны демонстрируют всплески активности во время переходных движений по сравнению с устойчивым уровнем разряда во время поддержания позы (Shadmehr, 2017).Соответственно, аналогичная концепция может быть применена к контролю фазической и тонической постуральной мышечной активности. Что касается постурального тонуса, то он исходит из нескольких надспинальных центров, включая ретикулярную формацию, вестибулярные ядра, мозжечок и мезодиэнцефальные ядра (Hess, 1954). Эти области мозга могут проявлять устойчивую длительную активность, обеспечивая длительное возбуждение и торможение исполнительных моторных систем. Кроме того, существуют также специализированные пути к спинному мозгу (Kuypers, 1964; Szokol, Perreault, 2009; Deliagina et al., 2014) и специализированная активация мускулатуры туловища при выполнении различных постуральных и моторных задач (Urquhart et al., 2005; Falgairolle et al., 2006, 2013; Tsao et al., 2011; Beliez et al., 2015). Например, нисходящие пути к осевой мускулатуре (которая связывает все части тела вместе и обеспечивает осевой мышечный тонус и стабилизацию туловища) через соматический нисходящий ствол мозга, а моноаминергические пути отличаются от нисходящих путей к мотонейронам конечностей (Kuypers, 1964; Szokol и другие., 2008; Sivertsen et al., 2014).
Медленные и быстрые процессы в центральной нервной системе также часто связаны с контролем мышечного тонуса и фазовой мышечной активности. Например, различные постуральные последствия связаны с медленными изменениями тонической мышечной активности (Gurfinkel et al., 1995; Kluzik et al., 2005; Bove et al., 2009; Wright, 2011). В некоторых условиях контроль, связанный с осанкой и связанный с равновесием, может быть дифференцирован в отношении медленных и быстрых компонентов смещения ЦО, соответственно.Например, участники с закупоренным видением проходит очень медленно (<0,1 ° / с) наклонами опорной платформы, подпороговый для большинства реакций вестибулярных и проприоцептивных фазических, дисплей очень больших компенсаторных сдвигов фазы и задержек (десятки секунд). Однако стоит отметить, что на большие медленные движения тела накладываются небольшие нерегулярные колебания, отражающие постоянный контроль равновесия (Gurfinkel et al., 1995). Таким образом, помимо оперативного управления, предназначенного для компенсации отклонений от исходного положения, система постурального контроля включает как минимум один дополнительный уровень, который разрабатывает этот постуральный «набор» с учетом затрат энергии на стояние, положения сегментов тела, мышечных моментов и т. Д. требования стабильности и безопасности.С функциональной точки зрения, это может решить старый парадокс движения осанки , введенный известным немецким ученым Эрихом фон Хольстом (1908–1962): как мы можем переходить из одной позы в другую, не вызывая сопротивления со стороны стабилизации позы. механизмы. Если кто-то считает, что поза и равновесие опосредуются отдельными нервными цепями, механизмы стабилизации позы могут быть ответственны за контроль равновесия по сравнению с определенным выше постуральным набором.
В основе привычной позы человека сидя или стоя лежит постуральный тонус скелетных мышц.Фазическая активность часто бывает произвольной (хотя она также может быть автоматической), тогда как тоническая непроизвольная активность менее известна и гораздо менее изучена. Существуют методические трудности, поскольку активность многих мышц (например, туловища) довольно мала. Под наркозом мышечный тонус исчезает, а тоническая активность может наблюдаться во время сна, поскольку есть некоторые активные фазы, сопровождающиеся мышечными тоническими сокращениями (Harris, 2005; Peever, 2011; Huon and Guilleminault, 2017). Среди важных примеров длительной непроизвольной активности — тонический вибрационный рефлекс (Eklund and Hagbarth, 1966) и непроизвольная мышечная активность после сокращения (Salmon, 1914; Kohnstamm, 1915), которые, как предполагалось, отражают усиление нейромоторных процессов, обычно участвующих в автоматических процессах. поддержание осанки и тоническая активность позвоночника (De Havas et al., 2017; Иваненко и др., 2017).
Важным вопросом является оценка и определение мышечного тонуса (Gurfinkel et al., 2011), который традиционно связан с уровнем мышечной активности. В клинической практике изменения тонуса, а не тонуса как такового , обычно измеряются степенью сопротивления мышц растяжению. Однако изменение длины мышц может также вызвать непроизвольные реакции сокращения (поведение податливой позы) или вызвать корректировку положения других «удаленных» мышц, которые не растягиваются в первую очередь (Andrews et al., 1972; Гурфинкель и др., 1989b). Динамический «постуральный фрейм», который неотъемлемо включен в осанку и координацию движений, может объяснять сопротивляющееся или послушное поведение тела (Cacciatore et al., 2014). В этом отношении интерпретация мышечного тонуса Бернштейном (1940) кажется более функциональной, поскольку степень готовности к движению , связанная с движением, как состояние связано с действием, или как предварительное условие связано с эффектом. Изменения мышечного тонуса влияют на движения.Замечательные открытия британского невролога Мартина (1967) являются прекрасными примерами того, как нарушение постурального тонуса у людей влияет на способность выполнять движения. Например, потеря нормальной позы головы и туловища может наблюдаться у пациентов с закрытыми глазами, в то время как неспособность удерживать тело может привести к постепенному сгибанию позы во время ходьбы. Кроме того, нарушения осанки туловища, ее динамика и вариабельность во время ходьбы могут различаться для идиопатической и паркинсонической камптокормии, что предполагает участие различных физиопатологических механизмов, лежащих в основе этой болезни (de Sèze et al., 2015). Кроме того, регулировка осанки туловища также может зависеть от условий ходьбы, например, при ходьбе вперед или назад (Иваненко и др., 2013). Эти нарушения связаны в первую очередь с автоматическим, а не произвольным контролем позы (Wright et al., 2007; Иваненко и др., 2013). Уровень тонической мышечной активности существенно влияет на ориентацию позы (Martin, 1967; Kluzik et al., 2005; Wright, 2011) и неотъемлемо включен в контроль походки (Mori, 1989).
Таким образом, центральная нервная система способна сочетать подвижность со стабильностью, а характер взаимодействия между позой и движением является давней проблемой в двигательной нейробиологии.Последний аспект лучше всего описал Шеррингтон (1906) более века назад: «поза следует за движением, как тень». Он даже предвидит движение. Тонизирующая мышечная активность и контроль осанки требуют специализированных нейронных схем. Правильный постуральный тонус является неотъемлемой частью любого движения, и нарушение мышечного тонуса может, в свою очередь, повлиять на выполнение движений. Чтобы понять, как контролировать позу и движения, нам нужно лучше знать, как создается и поддерживается постуральный тонус, включая его нервно-мышечные основы.
Авторские взносы
Все перечисленные авторы внесли существенный, прямой и интеллектуальный вклад в работу и одобрили ее к публикации.
Финансирование
Эта работа была поддержана Министерством здравоохранения Италии (IRCCS Ricerca corrente) и Программой робототехники Horizon 2020 (ICT-23-2014 в рамках Соглашения о гранте 644727-CogIMon).
Заявление о конфликте интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы благодарят доктора Джанфранко Боско за полезные комментарии к ранней версии рукописи.
Сокращения
CoM, центр массы тела; CoP, центр давления.
Список литературы
Балеструччи П., Дапрати Э., Лакванити Ф. и Маффеи В. (2017). Эффекты визуального движения, согласующиеся или несовместимые с гравитацией, на колебания позы. Exp. Brain Res. 235, 1999–2010. DOI: 10.1007 / s00221-017-4942-3
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Белье, Л., Barrière, G., Bertrand, S. S., and Cazalets, J. R. (2015). Происхождение активности грудной спинномозговой сети при двигательной активности новорожденных крыс. J. Neurosci. 35, 6117–6130. DOI: 10.1523 / JNEUROSCI.4145-14.2015
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Бернштейн, Н. А. (1940). «Исследования биодинамики ходьбы, бега и прыжков. Москва, Исследования Центрального научного института физической культуры. (По-русски). Английский перевод »в Human Motor Actions.Переоценка Бернштейна , под ред. Х. Т. А. Уайтинга (1984) (Амстердам: Северная Голландия), 171–222.
Блуэн Дж., Тисдейл Н. и Мучнино Л. (2007). Обработка вестибулярного сигнала у субъекта с соматосенсорной деафферентацией: случай сидячей позы. BMC Neurol. 7:25. DOI: 10.1186 / 1471-2377-7-25
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Бове, М., Феноджио, К., Таккино, А., Пелосин, Э., и Шиппати, М. (2009). Взаимодействие между зрением и проприоцепцией шеи при управлении стойкой. Неврология 164, 1601–1608. DOI: 10.1016 / j.neuroscience.2009.09.053
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Брукхарт, Дж. М., Пармеджиани, П. Л., Петерсен, В. А., и Стоун, С. А. (1965). Стабильность осанки у собаки. Am. J. Physiol. 208, 1047–1057. DOI: 10.1152 / ajplegacy.1965.208.6.1047
PubMed Аннотация | CrossRef Полный текст
Cacciatore, T. W., Mian, O. S., Peters, A., and Day, B. L. (2014). Нейромеханическое вмешательство позы в движение: свидетельства учителей техники Александра, вставших со стула. J. Neurophysiol. 112, 719–729. DOI: 10.1152 / jn.00617.2013
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Канейро, Дж. П., О’Салливан, П., Бернетт, А., Барач, А., О’Нил, Д., Твейт, О., и др. (2010). Влияние различных сидячих поз на положение головы / шеи и мышечную активность. Человек. Ther. 15, 54–60. DOI: 10.1016 / j.math.2009.06.002
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Чиба Р., Такакусаки К., Ота, Дж., Йозу, А., и Хага, Н. (2016). Модели контроля вертикальной осанки человека на основе мультисенсорных входных сигналов; в быстрой и медленной динамике. Neurosci. Res. 104, 96–104. DOI: 10.1016 / j.neures.2015.12.002
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Клейтон, Х. М., Наувелертс, С. (2014). Влияние завязанных глаз на переменные центра давления у здоровых лошадей во время спокойного стояния. Вет. J. 199, 365–369. DOI: 10.1016 / j.tvjl.2013.12.018
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Коломбини Б., Ночелла М. и Баньи М. А. (2016). Непересекающаяся жесткость активных мышечных волокон. J. Exp. Биол. 219, 153–160. DOI: 10.1242 / jeb.124370
PubMed Аннотация | CrossRef Полный текст
Даяниди, С., Катч, Дж. Дж., И Валеро-Куэвас, Ф. Дж. (2013). Уменьшение времени сокращения мышц дополняет нервное созревание в развитии динамических манипуляций. Дж.Neurosci. 33, 15050–15055. DOI: 10.1523 / JNEUROSCI.1968-13.2013
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Де Хавас, Дж., Гоми, Х., и Хаггард, П. (2017). Экспериментальные исследования принципов управления непроизвольным движением: всесторонний обзор феномена Конштамма. Exp. Brain Res. 235, 1953–1997. DOI: 10.1007 / s00221-017-4950-3
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Делягина, Т.Г., Белоозерова И. Н., Орловский Г. Н., Зеленин П. В. (2014). Вклад супраспинальных систем в генерацию автоматических постуральных реакций. Фронт. Интегр. Neurosci. 8:76. DOI: 10.3389 / fnint.2014.00076
PubMed Аннотация | CrossRef Полный текст | Google Scholar
де Сез, М. П., Гийо, Э., Слагач, Л., и Казале, Ж. Р. (2015). Исследование оценки камптокормии путем динамической количественной оценки сагиттальной позы. J. Rehabil. Med. 47, 72–79.DOI: 10.2340 / 16501977-1888
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ди Джулио, И., Маганарис, К. Н., Бальцопулос, В., и Лорам, И. Д. (2009). Проприоцептивная и агонистическая роль икроножных, камбаловидных и передних большеберцовых мышц в поддержании вертикального положения человека. J. Physiol. (Лондон) 587, 2399–2416. DOI: 10.1113 / jphysiol.2009.168690
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Falgairolle, M., Чеккато, Дж. К., Сезе, М., де Хербен, М., и Касале, Дж. Р. (2013). Метахрональное распространение двигательной активности. Фронт. Biosci. (Ориентир Эд) 18, 820–837. DOI: 10.2741 / 4146
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Falgairolle, M., de Seze, M., Juvin, L., Morin, D., and Cazalets, J. R. (2006). Скоординированное функционирование сети в спинном мозге: эволюционная перспектива. J. Physiol. Париж 100, 304–316. DOI: 10.1016 / j.jphysparis.2007.05.003
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фитцпатрик Р. и Макклоски Д. И. (1994). Проприоцептивный, зрительный и вестибулярный пороги для восприятия качания человека в положении стоя. J. Physiol. (Лондон) 478 (Pt 1), 173–186. DOI: 10.1113 / jphysiol.1994.sp020240
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фуксон, О. И., Беркинблит, М. Б., и Фельдман, А. Г. (1980). Спинальная лягушка учитывает схему своего тела во время протирания рефлекса. Наука 209, 1261–1263. DOI: 10.1126 / science.7403886
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Фунато Т., Аой С., Томита Н. и Цучия К. (2016). Плавное увеличение раскачивания стоящего человека за счет нестабильности из-за слабой реакции пола и шума. R. Soc. Open Sci. 3: 150570. DOI: 10.1098 / RSOS.150570
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Гален А. (1549). De Motu Musculorum .Лейден: Руиллум.
Гатев, П., Томас, С., Кеппл, Т., и Халлет, М. (1999). Стратегия равновесия голеностопного сустава с прямой связью в спокойной стойке у взрослых. J. Physiol. (Лондон) 514 (Pt 3), 915–928. DOI: 10.1111 / j.1469-7793.1999.915ad.x
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Гурфинкель В., Каччиаторе Т. В., Кордо П., Хорак Ф., Натт Дж. И Скосс Р. (2006). Постуральный мышечный тонус оси тела здорового человека. J. Neurophysiol. 96, 2678–2687. DOI: 10.1152 / jn.00406.2006
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Гурфинкель В. С. (1994). «Механизмы постуральной регуляции у человека», в Обзор физиологии и общей биологии , ред. Т. М. Турпаев и Н. К. Кольцов (Харвуд, Северная Дакота: Academic Publishers GmbH), 59–87.
Гурфинкель В. С., Каччиаторе Т. В., Кордо П. Дж. И Хорак Ф. Б. (2011). Метод измерения тонуса осевой и проксимальной мышцы. Дж.Vis. Exp. 3677. DOI: 10.3791 / 3677
CrossRef Полный текст | Google Scholar
Гурфинкель В. С., Иваненко Ю. П., Левик Ю. С. (1989a). Диссипативные процессы в пассивных скелетных мышцах человека. Биофизика 34, 499–503.
PubMed Аннотация | Google Scholar
Гурфинкель В. С., Иваненко Ю. П., Левик Ю. С. (1994). Вклад деформации стопы в изменение длины и угла мышц голеностопного сустава у человека в положении стоя. Physiol. Res. 43, 371–377.
PubMed Аннотация | Google Scholar
Гурфинкель В. С., Иваненко Ю. П., Левик Ю. С., Бабакова И. А. (1995). Кинестетический эталон для ортоградной осанки человека. Неврология 68, 229–243. DOI: 10.1016 / 0306-4522 (95) 00136-7
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Гурфинкель В. С., Левик Ю. С., Лебедев М. А. (1989b). Непосредственные и отдаленные постактивационные эффекты в двигательной системе человека. Нейрофизиология 21, 343–351.
PubMed Аннотация | Google Scholar
Хертер Т. М., Корбел Т. и Скотт С. Х. (2009). Сравнение нервных реакций в первичной моторной коре головного мозга на временные и постоянные нагрузки во время позы. J. Neurophysiol. 101, 150–163. DOI: 10.1152 / jn.
.2008
PubMed Аннотация | CrossRef Полный текст
Гесс, В. Р. (1954). Промежуточный мозг. Анатомия и экстрапирамидные функции . Нью-Йорк, Нью-Йорк: Грун и Страттон.
Ходжес, П. В., Гурфинкель, В. С., Брумань, С., Смит, Т. К., и Кордо, П. С. (2002). Сосуществование стабильности и подвижности в постуральном контроле: данные по постуральной компенсации дыхания. Exp. Brain Res. 144, 293–302. DOI: 10.1007 / s00221-002-1040-x
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Хорак, Ф. Б. (2006). Ориентация позы и равновесие: что нам нужно знать о нейронном контроле баланса, чтобы предотвратить падения? Возраст Старение 35 (Доп.2), ii7 – ii11. DOI: 10.1093 / старение / afl077
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Хорак, Ф. Б., и Макферсон, Дж. М. (1995). «Постуральная ориентация и равновесие», в Интеграция моторного, кровообращения, дыхания и метаболического контроля во время упражнений . Раздел 12, ред. Дж. Шепард и Л. Роуэлл (Нью-Йорк, Нью-Йорк: Справочник по физиологии; Oxford University Press), 1–39.
Huxley, A. F., and Niedergerke, R. (1954). Структурные изменения мышцы при сокращении; интерференционная микроскопия живых мышечных волокон. Природа 173, 971–973. DOI: 10.1038 / 173971a0
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Huxley, H., and Hanson, J. (1954). Изменения поперечной исчерченности мышц при сокращении и растяжении и их структурная интерпретация. Природа 173, 973–976. DOI: 10.1038 / 173973a0
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Иваненко, Ю. П., Доминичи, Н., Дапрати, Э., Нико, Д., Каппеллини, Г., и Лакванити, Ф.(2011). Опорно-двигательные схемы тела. Hum. Mov. Sci. 30, 341–351. DOI: 10.1016 / j.humov.2010.04.001
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Иваненко Ю. П., Грассо Р., Лакванити Ф. (1999). Влияние взгляда на постуральные реакции на проприоцептивную и вестибулярную стимуляцию шеи у людей. J. Physiol. (Лондон) 519 (Pt 1), 301–314. DOI: 10.1111 / j.1469-7793.1999.0301o.x
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Иваненко, Ю.П., Гурфинкель В. С., Селионов В. А., Солопова И. А., Силос-Лабини Ф., Гертин П. А. и др. (2017). Тоническая и ритмичная деятельность позвоночника, лежащая в основе движения. Curr. Pharm. Des. 23, 1753–1763. DOI: 10.2174/1381612823666170125152246
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Иваненко Ю. П., Левик Ю. С., Талис В. Л., Гурфинкель В. С. (1997). Равновесие человека на неустойчивой опоре: важность взаимодействия стопы и опоры. Neurosci.Lett. 235, 109–112. DOI: 10.1016 / S0304-3940 (97) 00721-0
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Jankovic, J. (2003). «Патофизиология и клиническая оценка симптомов и признаков паркинсонизма», в Справочнике по болезни Паркинсона , 3-е изд. , ред. Р. Пахва, К. Э. Лайонс и В. К. Коллер III (Нью-Йорк, штат Нью-Йорк: Марсель Деккер), 71–107.
Google Scholar
Джека, Дж., Киемель, Т., Креат, Р., Хорак, Ф., и Петерка, Р. (2004).Управление вертикальным положением человека: информация о скорости более точна, чем положение или ускорение. J. Neurophysiol. 92, 2368–2379. DOI: 10.1152 / jn.00983.2003
CrossRef Полный текст | Google Scholar
Киемель, Т., Элахи, А. Дж., И Джека, Дж. Дж. (2008). Идентификация растения для вертикального положения человека: несколько моделей движения из одной нейронной стратегии. J. Neurophysiol. 100, 3394–3406. DOI: 10.1152 / jn.01272.2007
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Клузик, Ю., Хорак, Ф. Б., и Петерка, Р. Дж. (2005). Различия в предпочтительных системах отсчета для постуральной ориентации проявляются в результате воздействия стойки на наклонной поверхности. Exp. Brain Res. 162, 474–489. DOI: 10.1007 / s00221-004-2124-6
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Конштамм О. (1915). Демонстрация einer katatonieartigen Erscheinung beim Gesunden (Katatonusversuch). Neurol Zentral Bl 34S, 290–291.
Курцер, И., Хертер, Т. М., и Скотт, С. Х. (2005). Случайное изменение в представлении корковой нагрузки предполагает четкий контроль позы и движения. Nat. Neurosci. 8, 498–504. DOI: 10.1038 / nn1420
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Лорам И. Д., Голли Х., Лаки М. и Гоутроп П. Дж. (2011). Контроль человека над перевернутым маятником: нужен ли постоянный контроль? Эффективен ли периодический контроль? Является ли прерывистый контроль физиологичным? Дж.Physiol. (Лондон) 589, 307–324. DOI: 10.1113 / jphysiol.2010.194712
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Лорам, И. Д., Маганарис, К. Н., и Лаки, М. (2007). Пассивные человеческие икроножные мышцы по отношению к стоянию: нелинейное уменьшение жесткости от короткого до дальнего действия. J. Physiol. (Лондон) 584, 661–675. DOI: 10.1113 / jphysiol.2007.140046
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Макферсон, Дж., и Хорак, Ф. Б. (2012). «Поза» в Принципах неврологии. 5-е издание , глава 41, ред. Э. Кандел, Дж. Шварц, Т. Джессел, С. Сигельбаум и А. Дж. Хадспет (Нью-Йорк, Нью-Йорк: Макгроу-Хилл), 935–959.
Магнус, Р. (1924). Körperstellung . Берлин, Гейдельберг: Springer
Магнус, Р., и де Кляйн, А. (1912). Die abhangigkeit des tonus der extremitaten muskeln von der kopfstellung. Pflug. Arch. Gesamte Physiol. Menschen Tiere 145, 455–548.DOI: 10.1007 / BF01681127
CrossRef Полный текст
Майер Э. (1961). [Продольное измерение исследования созревания детской стопы]. Monatsschr. Kinderheilkd. 109, 222–226.
PubMed Аннотация | Google Scholar
Мартин, Дж. П. (1967). Базальные ганглии и осанка . Лондон: Pitman Medical Publishing Co. LTD.
Масани К., Попович М. Р., Наказава К., Кузаки М. и Нозаки Д. (2003). Важность информации о скорости раскачивания тела в управлении действиями разгибателей голеностопного сустава в спокойной позе. J. Neurophysiol. 90, 3774–3782. DOI: 10.1152 / jn.00730.2002
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Мор, Х. Л., Хатчинсон, Дж. Р., Коллинз, Д. Ф., Вебер, Д. Дж., Аунг, С. К., и Донелан, Дж. М. (2010). Масштабирование сенсомоторного контроля у наземных млекопитающих. Proc. Биол. Sci. 277, 3563–3568. DOI: 10.1098 / rspb.2010.0898
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Мори, С. (1989). Вклад постурального мышечного тонуса в полное выражение позы и локомоторных движений: многогранный анализ его механизмов стволовой-спинной мозг у кошек. Jpn. J. Physiol. 39, 785–809. DOI: 10.2170 / jjphysiol.39.785
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Нардоне, А., Скиппати, М. (2010). Роль инструментальной оценки баланса в принятии клинических решений. Eur. J. Phys. Rehabil. Med. 46, 221–237.
PubMed Аннотация | Google Scholar
Номура, Т., Ошикава, С., Судзуки, Ю., Киёно, К., и Морассо, П. (2013). Моделирование осанки человека с использованием периодического контроля и гемодинамических нарушений. Math. Biosci. 245, 86–95. DOI: 10.1016 / j.mbs.2013.02.002
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Оба, Н., Сасагава, С., Ямамото, А., и Накадзава, К. (2015). Разница в контроле осанки при спокойном стоянии между маленькими детьми и взрослыми: оценка с ускорением центра масс. PLoS ONE 10: e0140235. DOI: 10.1371 / journal.pone.0140235
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Оучи, Ю., Окада, Х., Йошикава, Э., Нобезава, С., и Футацубаши, М. (1999). Активация мозга при поддержании позы стоя у человека. Мозг 122 (Pt 2), 329–338. DOI: 10.1093 / мозг / 122.2.329
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Пивер, Дж. (2011). Контроль функции мотонейронов и мышечного тонуса во время быстрого сна, расстройства поведения во время быстрого сна и катаплексии / нарколепсии. Arch. Ital. Биол. 149, 454–466. DOI: 10.4449 / aib.v149i4.1257
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Попов К.Е., Сметанин Б.Н., Гурфинкель В.С., Кудинова М.П., Шлыков В.И. (1986). Пространственное восприятие и вестибуломоторные реакции у человека. Нейрофизиология 18, 779–787.
PubMed Аннотация | Google Scholar
Проске У., Морган Д. Л. и Грегори Дж. Э. (1993). Тиксотропия в скелетных мышцах и в мышечных веретенах: обзор. Prog Neurobiol. 41, 705–721.DOI: 10.1016 / 0301-0082 (93)-N
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Рэк, П. М., и Уэстбери, Д. Р. (1974). Жесткость активной мышцы млекопитающих в ближнем диапазоне и ее влияние на механические свойства. J. Physiol. (Лондон) 240, 331–350. DOI: 10.1113 / jphysiol.1974.sp010613
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Радемейкер, Г. Дж. Дж. (1931). Das Stehen . Берлин; Гейдельберг: Springer
Google Scholar
Рея, К.К., Кифер, А. В., Райт, В. Г., Райсбек, Л. Д., и Харан, Ф. Дж. (2015). Интерпретация постурального контроля может измениться из-за методов обработки данных. Походка 41, 731–735. DOI: 10.1016 / j.gaitpost.2015.01.008
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Робертс, Т. Д. М. (1978). Нейрофизиология постуральных механизмов. 2-е изд. Лондон, Бостон: Butterworth-Heinemann Ltd.
Саканака Т. Э., Лаки М. и Рейнольдс Р.Ф. (2016). Зависимые от качания изменения жесткости голеностопного сустава при стоянии, вызванные тиксотропией мышц. J. Physiol. (Лондон) 594, 781–793. DOI: 10.1113 / JP271137
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Лосось, А. (1914). Nuove osservazioni sui movimenti automatici che si compiono dopo gli sforzi muscolari e del Ioro valore in neuropatologia. Atti Della Accademia Medico Fisica Fiorentina 78–91.
Сато Ю., Фунато Т., Янагихара Д., Sato, Y., Aoi, S., Fujiki, S., et al. (2015). Измерение раскачивания тела двуногой крысы и количественная оценка ее контроля позы. конф. Proc. IEEE Eng. Med. Биол. Soc. 2015, 5311–5314. DOI: 10.1109 / EMBC.2015.7319590
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Швайгарт, Г., Мергнер, Т. (2008). Контроль за позой человека за пределами устойчивой реакции и упрощения перевернутого маятника. Exp. Brain Res. 185, 635–653.DOI: 10.1007 / s00221-007-1189-4
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Shadmehr, R. (2017). Четкие нейронные цепи для управления движением по сравнению с неподвижностью. J. Neurophysiol. 117, 1431–1460. DOI: 10.1152 / jn.00840.2016
PubMed Аннотация | CrossRef Полный текст
Шеррингтон, К. (1906). Интегративное действие нервной системы . Нью-Йорк, Нью-Йорк: Сыновья Чарльза Скрибнера.
Google Scholar
Симоно, М., и Тисдейл, Н. (2015). Нарушение контроля равновесия у лиц с ожирением вызвано большей вариабельностью моторных команд баланса. Походка 41, 203–208. DOI: 10.1016 / j.gaitpost.2014.10.008
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Сивертсен, М.С., Гловер, Дж. К., и Перро, М. С. (2014). Организация мостовидных ретикулоспинальных входов в мотонейроны, контролирующие аксиальные мышцы и мышцы конечностей у новорожденных мышей. J. Neurophysiol. 112, 1628–1643.DOI: 10.1152 / jn.00820.2013
PubMed Аннотация | CrossRef Полный текст
Сметанин Б. Н., Попов К. Е., Гурфинкель В. С., Шлыков В. И. (1988). Влияние реальных и иллюзорных движений на вестибуломоторную реакцию человека. Нейрофизиология 20, 250–255.
PubMed Аннотация | Google Scholar
Солопова И. А., Казенников О. В., Денискина Н. Б., Левик Ю. С., Иваненко Ю. П. (2003). Постуральная нестабильность усиливает двигательные реакции на транскраниальную магнитную стимуляцию у людей. Neurosci. Lett. 337, 25–28. DOI: 10.1016 / S0304-3940 (02) 01297-1
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Straus, W. L. (1926). Развитие стопы человека и его филогенетическое значение. Am. J. Phys. Антрополь. 9, 427–438. DOI: 10.1002 / ajpa.13300
CrossRef Полный текст | Google Scholar
Сокол, К., Гловер, Дж. К., и Перро, М. С. (2008). Дифференциальное происхождение ретикулоспинального привода к мотонейронам, иннервирующим мышцы туловища и задних конечностей мышей, выявлено с помощью оптической записи. J. Physiol. (Лондон) 586, 5259–5276. DOI: 10.1113 / jphysiol.2008.158105
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Сокол, К., и Перро, М. К. (2009). Визуализация синаптически опосредованных ответов, производимых стволом мозга на идентифицированные спинномозговые нейроны у новорожденных мышей. J. Neurosci. Методы 180, 1–8. DOI: 10.1016 / j.jneumeth.2009.01.018
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Цао, Х., Даннилс, Л., и Ходжес, П. В. (2011). У людей отдельные пучки параспинальных мышц активируются дискретными корковыми сетями. Clin. Neurophysiol. 122, 1580–1587. DOI: 10.1016 / j.clinph.2011.01.048
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Уркхарт Д. М., Ходжес П. В. и Стори И. Х. (2005). Постуральная активность мышц брюшного пресса варьируется в зависимости от области этих мышц и положения тела. Походка 22, 295–301.DOI: 10.1016 / j.gaitpost.2004.09.012
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Варгезе, Дж. П., Бейер, К. Б., Уильямс, Л., Миясике-да-Сильва, В., и Макилрой, В. Э. (2015). Стоя на месте: есть ли роль коры головного мозга? Neurosci. Lett. 590, 18–23. DOI: 10.1016 / j.neulet.2015.01.055
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Виндхорст, У. (1996). Спинной мозг и его головной мозг: изображения и модели.В какой степени механизмы переднего мозга проявляются на уровне спинного мозга ствола головного мозга? Прог. Neurobiol. 49, 381–414. DOI: 10.1016 / 0301-0082 (96) 00022-6
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Винтер Д. А., Патла А. Э., Исхак М. и Гейдж В. Х. (2003). Двигательные механизмы равновесия при спокойном стоянии. J. Electromyogr. Кинезиол. 13, 49–56. DOI: 10.1016 / S1050-6411 (02) 00085-8
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Райт, В.Г., Гурфинкель, В. С., Натт, Дж., Хорак, Ф. Б., и Кордо, П. Дж. (2007). Осевой гипертонус при болезни Паркинсона: прямые измерения крутящего момента туловища и бедра. Exp. Neurol. 208, 38–46. DOI: 10.1016 / j.expneurol.2007.07.002
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Райт, В. Г., Иваненко, Ю. П., Гурфинкель, В. С. (2012). Специализация по анатомии стопы для осязания и контроля осанки. J. Neurophysiol. 107, 1513–1521. DOI: 10.1152 / ян.00256.2011
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Контроль осанки человека
Abstract
С древней Греции до наших дней исследования контроля осанки основывались на многих концепциях. Контроль равновесия часто считается частью контроля позы. Тем не менее, в системе постурального контроля становятся все более очевидными два разных уровня: один уровень задает распределение тонической мышечной активности («поза»), а другой назначается для компенсации внутренних или внешних возмущений («равновесие»).Хотя эти два уровня по своей сути взаимосвязаны, как нейрофизиологические, так и функциональные соображения указывают на различные нервно-мышечные основы. Нарушения мышечного тонуса, в свою очередь, могут повлиять на двигательную способность. Уникальная структура, специализация и свойства скелетных мышц также должны быть приняты во внимание для понимания важных периферийных факторов, влияющих на постуральную регуляцию. Здесь мы рассмотрим нейромеханическую основу привычной позы и различные концепции, которые оказали большое влияние на многие экспериментальные исследования и математические модели управления позой человека.
Ключевые слова: контроль осанки, равновесие, мышечный тонус, постуральные рефлексы, мультисенсорные взаимодействия, схема постурального тела
Введение
Жизнь развивалась в присутствии силы тяжести, и с древней Греции до наших дней было признано, что осанка поддерживается тоническими мышечными сокращениями, действующими против силы тяжести и стабилизирующими положение сегментов тела. Греческий врач Гален из Пергама был, вероятно, первым, кто ввел понятие мышечного тонуса в своей работе «De motu musculorum» (Гален, 1549).Из клинических наблюдений давно известно, что поражение центральной нервной системы может приводить к выраженным изменениям осанки. Систематические экспериментальные исследования физиологических механизмов постуральной регуляции были начаты только столетие назад Шеррингтоном (1906, 1915) и получили дальнейшее развитие у Магнуса (Magnus and de Klein, 1912; Magnus, 1924) и Радемейкера (1931). Для понимания механизмов контроля баланса использовались различные биомеханические и нейрофизиологические подходы (Horak and Macpherson, 1995).
Мы начинаем этот обзор с влиятельной схемы управления вертикальной позой, основанной на идее перевернутого маятника и наличия колебаний центра давления (ЦД) как важной меры устойчивости позы. В упрощенной модели вертикального положения человека с перевернутым маятником центр массы тела (ЦМ) является единственной контролируемой переменной (Winter et al., 2003). При спокойном стоянии CoP колеблется по обе стороны от CoM, чтобы удерживать его в довольно постоянном положении между двумя ногами (рисунок).Поскольку центр масс тела (ЦМ) расположен относительно высоко (в туловище, на ~ 1 м выше щиколоток, что определяет длину перевернутого маятника), а основание опоры относительно невелико, поза по своей природе нестабильна. Соответственно, можно сделать вывод, что чем выше расположение CoM, тем больше колебания CoP. Однако это утверждение является упрощением и вводит в заблуждение. Например, на рисунке показаны типичные примеры центра колебаний давления во время спокойного стояния у кошки, собаки и человека.Обратите внимание на аналогичные колебания ЦО (~ 1-2 см), несмотря на существенные различия в высоте центра масс над опорой. Сравнимое (~ 1 см CoP) раскачивание тела наблюдалось также у лошадей (Clayton and Nauwelaerts, 2014) и у крыс (~ 2 см CoP), обученных стоять на двух ногах (Sato et al., 2015). Поэтому простая схема «чем ниже CoM, тем меньше колебания CoP» обманчива или, по крайней мере, не может быть распространена на животных разного размера. Кроме того, амплитуда колебаний CoP намного меньше, чем фактическая база опоры (схематически изображенная на рисунке, средние панели), и, вероятно, обеспечит стабильность, даже если она будет больше.
Колебания центра давления (ЦД) при спокойном стоянии у кошки (A) , собаки (B) и человека (C) . Примеры трассировок CoP (внизу) адаптированы из MacPherson and Horak (2012) с разрешения в (A) , перерисованы из Brookhart et al. (1965) в (B) и модифицировано из Ivanenko et al. (1999) в (C) . Размер основания опоры схематично изображен на средних панелях. Обратите внимание на сопоставимые колебания ЦМ (~ 2 см) у четвероногих относительно человека, несмотря на 5-кратную разницу в высоте центра масс над опорой.
Таким образом, важно подчеркнуть, что простые биомеханические соображения могут объяснить поведение позы лишь до некоторой степени. Кроме того, колебания ЦС отражают только оперативный уровень контроля позы, связанный со стабилизацией ориентации определенных постуральных сегментов тела. Однако каковы принципы, определяющие привычные конфигурации позы и тоническую мышечную активность вдоль оси тела? Постуральный тонус (часто связанный с антигравитационной поддержкой) представляет собой тоническую активацию мышц, чтобы обеспечить определенное положение тела и создать силу, отталкивающуюся от земли, чтобы конечности оставались вытянутыми.Привычная поза варьируется у разных животных и может включать вытянутые конечности или полусогнутую позу. Антигравитационная поддержка у людей частично обеспечивается пассивными силами костей в суставах, растянутых связках и мышцах, но также требует активного сокращения в разгибателях нижних конечностей, туловища и шеи. Управление тонусом позы непросто и требует специализированных нейронных схем. Требуется подробная информация об основных нейронных цепях, а также о лежащих в основе клеточных процессах, обеспечивающих длительную мышечную силу и жесткость.Стоит отметить, что осанка у разных людей определяется как индивидуальной морфологией, так и специфической низкоуровневой мышечной активностью, на которую также могут существенно влиять различные патологические состояния. Интеграция нескольких сенсорных и моторных областей развивалась на протяжении миллионов лет эволюции жизни с целью обеспечения точного регулирования ориентации тела в гравитационном поле.
Здесь мы рассматриваем экспериментальные проблемы, которые влияют на то, как мы определяем и рассматриваем механизмы мышечного тонуса и постуральной регуляции.В первом разделе мы кратко обсуждаем структурную и функциональную сложность постуральных мышц, потому что любое размышление о мышечном тонусе и его контроле должно учитывать знание уникальной структуры и свойств скелетных мышц. В следующих разделах мы обсуждаем идеи и подходы, которые представляют или представляют важные концептуальные основы для исследования контроля за позой человека.
Структурная и функциональная сложность постуральных скелетных мышц
Структура и функция скелетных мышц позволяют выполнять широкий спектр действий, от быстрого создания силы и движения до длительного поддержания ориентации сегментов тела относительно силы тяжести.Кроме того, специфическая для задачи активация функционально различных типов мышечных волокон, составляющих данную мышцу, может обеспечить богатый набор мышечных сокращений и выработку энергии. Постуральный тонус обычно рассматривается как мышечное напряжение низкого уровня, наблюдаемое как в дистальных, так и в проксимальных (туловище и шея) скелетных мышцах. Тем не менее, нельзя размышлять о постуральном тонусе, рассматривая только нервный сигнал от подкорковых и корковых структур. Недавние биохимические и биомеханические данные заставили серьезно переоценить структурную и функциональную сложность мышц (Knight, 2016).В частности, теория скользящих нитей для мышечного сокращения была расширена за счет включения регуляторных и цитоскелетных белков, которые отвечают за вязкоупругие свойства мышц и экономию производства силы — ключевые периферические вклады в постуральную регуляцию.
Теория скользящих филаментов основана на модели, в которой актиновые и миозиновые филаменты скользят друг мимо друга, и была введена в 1954 году независимо двумя группами (Huxley and Hanson, 1954; Huxley and Niedergerke, 1954).Хью Хаксли формально предложил механизм скольжения нити, который получил название поперечно-мостовой модели. Согласно его модели, скольжение филаментов происходит за счет циклического прикрепления и отсоединения миозина от актиновых филаментов. Сокращение происходит, когда миозин тянет актиновую нить к центру полосы А, отделяется от актина и создает силу (удар) для связывания со следующей молекулой актина. Однако современные взгляды на механизм сокращения мышц включают три скользящих филамента, а именно актин, миозин и тайтин (Knight, 2016).Важно отметить, что, помимо связей с сарколеммой через Т-канальцы и саркоплазматический ретикулум, саркомеры связаны другими внесаркомерными структурами цитоскелета на Z-диске и M-полосе. Эта структура претерпевает обратимые осевые и поперечные конформационные изменения в сжимающемся саркомере. Саркомерная структура цитоскелета играет ключевую роль в теории скользящих филаментов (Gautel and Djinović-Carugo, 2016).
В контексте постуральной функции скелетных мышц и стабилизации сегментов тела, эластические свойства скелетной мускулатуры и мышечное напряжение тесно связаны с регуляторными и цитоскелетными белками.Несмотря на то, что постуральная мышечная активность довольно мала, стоит подчеркнуть, что любая поза не является пассивной, и специфическая малая активность мышц шеи, туловища и конечностей определяет напряжение покоя, осевой тонус, индивидуальные позы, выражение лица и т. Д. (Jankovic, 2003 ; Gurfinkel et al., 2006; Wright et al., 2007; Caneiro et al., 2010). Длительное поддержание постуральной мышечной активности (минуты или даже часы) связано с низкими энергетическими затратами. Постуральная активность обычно задействует медленные мышечные волокна, которые более устойчивы к утомлению.Как управлять этим механизмом во время позы и небольших движений, которые часто присутствуют при поддержании позы? В дополнение к избирательной активации соответствующих мышечных волокон, малоизученный, но интригующий аспект постурального мышечного тонуса включает в себя механизмы эластичности мышц, увеличения силы и сохранения энергии.
Например, статическая жесткость зависит от кальций-зависимой жесткости активированных волокон, независимо от образования поперечных мостиков, и тайтин, по-видимому, обладает всеми характеристиками, необходимыми для учета свойств статической жесткости (Colombini et al., 2016). Увеличение силы также может быть результатом взаимодействия между эластичным элементом в мышечных саркомерах и поперечными перемычками, которые, в свою очередь, взаимодействуют с эластичными элементами, регулируя их длину и жесткость. Мышечная модель, основанная на гипотезе извилистой нити, может предсказать увеличение остаточной силы в мышцах (Nishikawa, 2016). Гигантский белковый небулин является одним из важных регуляторных белков, и было предложено использовать его в качестве «молекулярного линейки» для определения длины тонких нитей, которые играют роль во многих клеточных процессах, включая регуляцию сокращения мышц, вязкоупругие свойства, Z- формирование диска и сборка миофибрилл (Chu et al., 2016). Взаимодействие между тайтином и небулином все еще не определено. Наконец, зависимые от употребления изменения в составе мышечных волокон (Hoppeler, 2016) и прогрессирующее уменьшение времени сокращения мышц в процессе развития ребенка наряду с созреванием центральной нервной системы, контролирующей позу и движения (Dayanidhi et al., 2013), отражают функциональные преимущества такого постоянного созревания и указывают на важную роль фенотипической пластичности мышц. Вышеупомянутые темы традиционно игнорировались, хотя прогресс в выяснении молекулярных механизмов сокращения мышц открывает новые возможности для понимания важных периферийных факторов, влияющих на постуральную регуляцию и пластичность мышц.
Концептуальные основы и подходы к исследованию постурального контроля
Вертикальное двуногое положение традиционно описывается как зависящее от сенсорных (зрительных, вестибулярных и соматосенсорных) сигналов, обеспечивающих постуральное равновесие и правильное выравнивание сегментов тела относительно силы тяжести. Природа мультисенсорных взаимодействий была предметом множества исследований. С концептуальной точки зрения ниже мы рассмотрим три мифа о постуральной регуляции, которые оказали большое влияние на многие экспериментальные исследования и математические модели управления позой человека: (1) система контроля осанки является линейной, (2) контроль осанки определяется рефлексы, и (3) контроль позы — это контроль равновесия.
Нелинейные свойства системы контроля осанки
Небольшие движения сопровождают поддержание любой позы. Обычно, если человеческая осанка нестабильна, колебания сегментов тела не превышают 1–2 ° движений суставов, а колебания ЦС составляют около 1–2 см. Тот факт, что осцилляции осанки малы, подтверждает предположение о том, что система является линейной в ограниченном диапазоне движений и, следовательно, могут применяться линейные вычислительные модели и анализ (Winter et al., 2003; Мергнер, 2007; Киемель и др., 2008; Асслендер и Петерка, 2014). Хотя это предположение до некоторой степени справедливо, и многие исследования предоставили очень важную информацию о стратегиях осанки и вкладе различных сенсорных сигналов в контроль баланса, следует иметь в виду, что существует также существенная нелинейность в системе контроля осанки, а именно: часто упускается из виду.
Во-первых, некоторая нелинейность существует уже на уровне мышц, так как их устойчивость к небольшим угловым возмущениям (~ 1 °, соответствует примерно 1% изменениям длины мышечных волокон, так называемая жесткость короткого диапазона , Rack and Westbury, 1974) намного выше, чем устойчивость к более сильным возмущениям.Несмотря на то, что жесткости активных мышц голени на коротких дистанциях может быть недостаточно для полной компенсации колебаний тела во время спокойного стояния (Morasso and Schieppati, 1999; Loram et al., 2007), ее вклад определенно важен (Gurfinkel et al., 1995). ). Тиксотропия скелетных мышц (Gurfinkel et al., 1989a) дополнительно способствует увеличению жесткости мышц в зависимости от времени для длительных постуральных движений. Действительно, компонент жесткости на коротком расстоянии меньше в периоды сильного постурального колебания.Таким образом, наблюдается значительное снижение (до 43%) внутренней жесткости голеностопного сустава в условиях повышенного базового раскачивания (Sakanaka et al., 2016), что свидетельствует о значительном влиянии истории раскачивания. Интрафузальные волокна мышечных веретен также демонстрируют тиксотропное поведение, что подразумевает усиление проприоцепции, связанное с анамнезом (Proske et al., 1993). В целом, игнорирование нелинейной зависимости жесткости голеностопного сустава от величины раскачивания может привести к серьезной неверной интерпретации результатов экспериментов, в которых используются механические возмущения или сенсорные манипуляции, такие как закрытие глаз, подвижные или нестабильные опорные поверхности, привязка к раскачиванию и т. Д.(Loram et al., 2007).
Во-вторых, поскольку осцилляции осанки небольшие, внутри тела происходят значительные нелинейные перераспределения внутренних смещений мышечных волокон, сухожилий и мягких тканей. Например, из-за податливости ахиллова сухожилия наблюдается парадоксальное укорачивание камбаловидной и икроножной мышц, когда тело наклоняется вперед, и удлинение, когда тело возвращается, оставляя неопределенной постуральную роль многочисленных веретен икроножных мышц в обнаружении колебаний тела (Loram и другие., 2004). Кроме того, контроль равновесия и внутренних смещений (мышечных волокон, связок и мягких тканей) не ограничивается дистальными суставами. Например, нарушения осанки могут быть результатом дыхательных движений грудной клетки и живота и должны компенсироваться движением нижних конечностей и таза (Hodges et al., 2002). Кроме того, для стабилизации позы требуется постоянная активность осевых мышц для стабилизации туловища (и головы) и, при необходимости, для компенсации движений дистальных частей тела.Наконец, человеческая стопа при спокойном стоянии подвергается значительным деформациям из-за небольших смещений СоМ и деформаций мягких тканей и свода стопы. Стоит подчеркнуть, что вертикальные колебания пяточной кости (и переднего отдела стопы) на ~ 0,5 мм, наблюдаемые при спокойном стоянии у здоровых взрослых людей (Gurfinkel et al., 1994), вызывают наклон тела примерно на 0,5 ° (смещения КПД ~ 0,7 см) даже в отсутствие смещений голеностопного сустава. Ожидается, что у маленьких детей эти деформации и их влияние на контроль осанки будут еще больше, поскольку детская стопа претерпевает значительные изменения формы и мягких тканей подошвы стопы в процессе развития (например,g., наличие жировой подушечки под подошвенной поверхностью стопы у младенцев), когда ребенок начинает стоять и ходить. Более того, развитие костной структуры продольной дуги начинается только через ~ 1 год после рождения и продолжается до 5 лет (Straus, 1926; Maier, 1961). Постуральная активность многочисленных внутренних мышц стопы (которая, как правило, не регистрируется в исследованиях осанки) дополнительно способствует пластичности стопы человека. Также есть большие индивидуальные различия в деформациях стопы.Эти деформации приводят к большим ошибкам в измеренных изменениях угла голеностопного сустава, а даже незначительные локальные деформации стопы вызывают заметные направленные постуральные реакции (Gurfinkel et al., 1994; Wright et al., 2012). Однако многие постуральные исследования, как правило, сосредоточены на простом шарнирном действии голеностопного сустава (Gatev et al., 1999; Masani et al., 2003; Winter et al., 2003; Mergner, 2007).
Обработка колебаний CoP подразумевает определенную степень нелинейности. Контроль вертикальной позы во время спокойного стояния часто исследовался путем количественной оценки спонтанного постурального колебания в областях смещения, скорости и частоты.Тем не менее, анализ и интерпретация результатов следует проводить осторожно, поскольку методика обработки данных может повлиять на структуру изменчивости ЦС (Rhea et al., 2015). Кроме того, сходные амплитуды колебаний ЦС у разных животных (рисунок) поднимают важный вопрос об их нормировании на рост, массу тела и размер основания опоры. Может ли это отражать эволюционно принятый сенсорный порог для контроля постурального колебания? Действительно, несмотря на различия в размерах тела, проприоцептивные пороги (для мышечных веретен, суставов и рецепторов нагрузки), скорости нервной проводимости и типы мышечных волокон у наземных млекопитающих схожи, что позволяет предположить, что простое масштабирование размеров не может применяться при сравнении сенсомоторной контроль между видами (More et al., 2010). Каким бы ни был точный механизм сопоставимых осцилляций ЦО (рисунок), вклад, вероятно, будут иметь как механические, так и нервные факторы (Gatev et al., 1999; Masani et al., 2003; Winter et al., 2003; Di Giulio et al., 2009). ; Симоно, Тисдейл, 2015). Эти соображения также важны для исследований развития. Например, колебания ЦС подобны или больше (но никогда не меньше) у маленьких детей по сравнению с взрослыми людьми, несмотря на более чем 2-кратную разницу в росте (Oba et al., 2015). В некоторой степени они могут быть объяснены развитием у детей устойчивости позы. Однако нам неизвестен квант колебаний ЦО, связанный с нестабильностью, и какая пропорция может быть скорректирована с помощью «неизвестной» процедуры нормировки. Другими словами, мы не уверены в том, следует ли и каким образом нормализовать амплитуду ЦС по росту для одного и того же животного в разном возрасте развития.
Существуют также другие нелинейные свойства сенсомоторной системы, включая пороги (например,g., для вестибулярной стимуляции), задержки проприоцептивной обратной связи и нервно-мышечной задержки производства силы. Нелинейная геометрия скелетно-мышечных связей (например, зависимость моментного плеча мышц от угла сустава) вносит свой вклад в нелинейные свойства сенсомоторной системы, хотя этот тип нелинейности более заметен во время относительно больших движений или постуральных движений. возмущения или при изменении позы. Мы не будем здесь рассматривать многочисленные постуральные модели и будем ссылаться на другие статьи, связанные со стратегией нелинейного управления, включая взрывоподобную активацию мышц, особенно наблюдаемую в нестабильных условиях.Было даже высказано предположение, что прерывистое управление разомкнутым контуром может быть подходящим решением для борьбы с временными задержками обратной связи, моторным шумом и вычислительно-мышечной экономией (Loram et al., 2011). Смена парадигм в будущих экспериментальных или модельных исследованиях может быть связана с развитием нелинейных подходов (Loram et al., 2011; Nomura et al., 2013; Funato et al., 2016), хотя сложность модели может ценою понимания. Эти ограничения приводят к необходимому компромиссу между использованием линейных подходов и более сложных моделей осанки.Тем не менее, даже если мы для простоты применяем линейные вычисления (например, Kiemel et al., 2008; Assländer and Peterka, 2014), мы должны иметь в виду значительную нелинейность в нервно-мышечном контроле позы.
Контроль осанки как сумма постуральных рефлексов
Ранние постуральные исследования делали акцент на рефлекторной природе постуральных механизмов и приводили различные важные примеры статических постуральных реакций (Магнус, 1924; Робертс, 1978). Идея рефлексов растяжения, сенсорной (проприоцептивной, зрительной и вестибулярной) обратной связи и ее нарушения при различных формах патологии спинного мозга, ствола мозга и мозжечка в сочетании с разработанной позднее концепцией серворегуляции сыграла важную роль в оценке и моделировании. контроля осанки человека.
С другой стороны, было понято, что понятие постуральных рефлексов довольно ограничено, чтобы учесть фактическую сложность контроля позы, которая включает упреждающие или упреждающие корректировки, контекстно-зависимые сенсомоторные (или «рефлекторные») модуляции, постуральные схема тела и интеграция позы и движений (Massion, 1994). Примечательной иллюстрацией постуральной схемы тела является модуляция автоматических постуральных реакций (например, в ответ на гальваническую вестибулярную стимуляцию, вибрацию мышц или постуральное возмущение) в соответствии с иллюзорным, а не реальным положением головы или сегментов тела (Gurfinkel, 1994). ).Существует несколько техник, позволяющих искусственно вызвать диссоциацию между реальной и воспринимаемой конфигурацией тела: вызывая проприоцептивные иллюзии, используя феномен «возврата» субъективного положения головы в нейтральное положение после длительного поворота или гипнотическое внушение. Все эти техники показывают сходное влияние на пространственно-ориентированные постуральные реакции на сенсорную стимуляцию. Изменения направления взгляда также могут модулировать постуральные реакции (Иваненко и др., 1999), что согласуется с супраспинальными или когнитивными влияниями на контроль позы, вероятно, потому, что взгляд представляет собой важную опорную систему для внутренней модели пространственной ориентации.Таким образом, тот факт, что автоматические постуральные реакции осуществляются в соответствии с внутренней репрезентацией схемы тела (Попов и др., 1986; Сметанин и др., 1988; Гурфинкель, 1994), указывает на то, что они служат не только для сознательного восприятия положения, но и это также основа для планирования и реализации двигательной активности. Контроль баланса как во время стояния, так и во время движений зависит от сложного взаимодействия физиологических механизмов, обработки сенсорной информации на высоком уровне в соответствии со схемой постурального тела, а также от ожиданий, целей, когнитивных факторов и предшествующего опыта человека.Элементы схемы тела существуют уже на уровне спинного мозга и вносят вклад в обработку сенсорной информации и постуральных реакций (Fukson et al., 1980; Windhorst, 1996; Poppele and Bosco, 2003). Понятие схемы тела привлекло внимание в широком контексте современного моторного контроля для понимания адаптируемости рефлекторной модуляции, ряда процессов, таких как оценка состояния, прогнозирование, обучение, а также для преодоления разрыва между когнитивными и моторными функциями (Gurfinkel, 1994). ; Маравита, Ирики, 2004; Виндхорст, 2007; Пирсон, Грамлих, 2010; Иваненко и др., 2011; Макферсон и Горак, 2012; Херцфельд и Шадмер, 2014).
В целом, контроль позы больше не считается одной системой или данным набором равновесных рефлексов, а скорее моторным навыком (Horak and Macpherson, 1995). Многие исследования сосредоточены на количественной оценке усиления рефлексов конкретных нервных путей, таких как рефлекс Хоффмана, местных рефлексов растяжения в отдельных суставах, моторных вызванных потенциалов и т. Д., Или применении определенного теста на равновесие. Они предоставляют знания о возбудимости этих путей в конкретных условиях.Однако представление о том, что за контроль позы отвечают несколько путей или центров в мозге, весьма ограничивает наши способности оценивать риски падения и улучшать равновесие. Кроме того, корковое вовлечение высокого уровня увеличивается по мере увеличения постуральных проблем или требований реактивного контроля (Ouchi et al., 1999; Solopova et al., 2003; Varghese et al., 2015). С точки зрения диагностики и реабилитации, « необходимо оценить многие системы, чтобы понять, что не так с балансом человека» (Horak, 2006).
Контроль осанки и контроль равновесия
Во многих статьях по контролю осанки обычно утверждается, что сенсорная информация от соматосенсорной, вестибулярной и зрительной систем объединяется для поддержания равновесия (Фитцпатрик и Макклоски, 1994; Блуин и др., 2007; Мергнер) , 2007; Assländer, Peterka, 2014; Chiba et al., 2016). Соответственно, большая часть последовательных исследований, посвященных постуральному равновесию, изучает, как сенсорные входы повторно взвешиваются или как нейронные стратегии меняются в различных ситуациях для контроля баланса и постуральных реакций на возмущения (Nashner, 1976; Ivanenko et al., 1997; Jeka et al., 2004; Швейгарт и Мергнер, 2008; Нардоне и Шиппати, 2010; Симоно и Тисдейл, 2015; Balestrucci et al., 2017). Однако система контроля позы должна решать две задачи одновременно: одна задает распределение тонической мышечной активности («поза»), а другая предназначена для компенсации внутренних или внешних возмущений («равновесие»). Эквивалентны ли эти две задачи?
Начнем с того, что контроль движения и поддержание фиксированной позы конечности после движения (удержание части тела в месте назначения) включает различные нервные цепи в стволе мозга, мозжечке, моторной коре, гиппокампе и т.(Шадмер, 2017). Например, многие нейроны первичной моторной коры, которые выражают связанную с нагрузкой активность, задействованы исключительно во время либо только позы, либо только движения, то есть они по-разному реагируют на временные и постоянные нагрузки, прикладываемые во время позы (Kurtzer et al., 2005; Herter et al., др., 2009). Было высказано предположение, что необходимость наличия «цепи удержания» могла возникнуть из-за необходимости поддерживать постоянное «сенсорное состояние», в то время как контуры, отвечающие за перемещение части тела, изменяют ее сенсорное состояние.Поскольку две задачи (движение и неподвижность) по своей сути взаимосвязаны, между этими контурами также существует перекрытие и взаимодействие. Тем не менее они существенно различаются. Нейрофизиологические данные по различным модальностям, касающимся контроля взгляда, движений головы, движений рук, позы и локомоций, показывают, что отдельные интернейроны и мотонейроны демонстрируют всплески активности во время переходных движений по сравнению с устойчивым уровнем разряда во время поддержания позы (Shadmehr, 2017).Соответственно, аналогичная концепция может быть применена к контролю фазической и тонической постуральной мышечной активности. Что касается постурального тонуса, то он исходит из нескольких надспинальных центров, включая ретикулярную формацию, вестибулярные ядра, мозжечок и мезодиэнцефальные ядра (Hess, 1954). Эти области мозга могут проявлять устойчивую длительную активность, обеспечивая длительное возбуждение и торможение исполнительных моторных систем. Кроме того, существуют также специализированные пути к спинному мозгу (Kuypers, 1964; Szokol, Perreault, 2009; Deliagina et al., 2014) и специализированная активация мускулатуры туловища при выполнении различных постуральных и моторных задач (Urquhart et al., 2005; Falgairolle et al., 2006, 2013; Tsao et al., 2011; Beliez et al., 2015). Например, нисходящие пути к осевой мускулатуре (которая связывает все части тела вместе и обеспечивает осевой мышечный тонус и стабилизацию туловища) через соматический нисходящий ствол мозга, а моноаминергические пути отличаются от нисходящих путей к мотонейронам конечностей (Kuypers, 1964; Szokol и другие., 2008; Sivertsen et al., 2014).
Медленные и быстрые процессы в центральной нервной системе также часто связаны с контролем мышечного тонуса и фазовой мышечной активности. Например, различные постуральные последствия связаны с медленными изменениями тонической мышечной активности (Gurfinkel et al., 1995; Kluzik et al., 2005; Bove et al., 2009; Wright, 2011). В некоторых условиях контроль, связанный с осанкой и связанный с равновесием, может быть дифференцирован в отношении медленных и быстрых компонентов смещения ЦО, соответственно.Например, участники с закупоренным видением проходит очень медленно (<0,1 ° / с) наклонами опорной платформы, подпороговый для большинства реакций вестибулярных и проприоцептивных фазических, дисплей очень больших компенсаторных сдвигов фазы и задержек (десятки секунд). Однако стоит отметить, что на большие медленные движения тела накладываются небольшие нерегулярные колебания, отражающие постоянный контроль равновесия (Gurfinkel et al., 1995). Таким образом, помимо оперативного управления, предназначенного для компенсации отклонений от исходного положения, система постурального контроля включает как минимум один дополнительный уровень, который разрабатывает этот постуральный «набор» с учетом затрат энергии на стояние, положения сегментов тела, мышечных моментов и т. Д. требования стабильности и безопасности.С функциональной точки зрения, это может решить старый парадокс движения и осанки , введенный известным немецким ученым Эрихом фон Хольстом (1908–1962): как мы можем переходить из одной позы в другую, не вызывая сопротивления со стороны стабилизации позы. механизмы. Если кто-то считает, что поза и равновесие опосредуются отдельными нервными цепями, механизмы стабилизации позы могут быть ответственны за контроль равновесия по сравнению с определенным выше постуральным набором.
В основе привычной позы человека сидя или стоя лежит постуральный тонус скелетных мышц.Фазическая активность часто бывает произвольной (хотя она также может быть автоматической), тогда как тоническая непроизвольная активность менее известна и гораздо менее изучена. Существуют методические трудности, поскольку активность многих мышц (например, туловища) довольно мала. Под наркозом мышечный тонус исчезает, а тоническая активность может наблюдаться во время сна, поскольку есть некоторые активные фазы, сопровождающиеся мышечными тоническими сокращениями (Harris, 2005; Peever, 2011; Huon and Guilleminault, 2017). Среди важных примеров длительной непроизвольной активности — тонический вибрационный рефлекс (Eklund and Hagbarth, 1966) и непроизвольная мышечная активность после сокращения (Salmon, 1914; Kohnstamm, 1915), которые, как предполагалось, отражают усиление нейромоторных процессов, обычно участвующих в автоматических процессах. поддержание осанки и тоническая активность позвоночника (De Havas et al., 2017; Иваненко и др., 2017).
Важным вопросом является оценка и определение мышечного тонуса (Gurfinkel et al., 2011), который традиционно связан с уровнем мышечной активности. В клинической практике изменения тонуса обычно измеряются, а не тонус как таковой , по степени сопротивления мышц растяжению. Однако изменение длины мышц может также вызвать непроизвольные реакции сокращения (поведение податливой позы) или вызвать корректировку положения других «удаленных» мышц, которые не растягиваются в первую очередь (Andrews et al., 1972; Гурфинкель и др., 1989b). Динамический «постуральный фрейм», который неотъемлемо включен в осанку и координацию движений, может объяснять сопротивляющееся или послушное поведение тела (Cacciatore et al., 2014). В этом отношении интерпретация мышечного тонуса Бернштейном (1940) кажется более функциональной, поскольку степень готовности к движению, связанная с движением, как состояние связано с действием или как предварительное условие связано с действием. Изменения мышечного тонуса влияют на движения.Замечательные открытия британского невролога Мартина (1967) являются прекрасными примерами того, как нарушение постурального тонуса у людей влияет на способность выполнять движения. Например, потеря нормальной позы головы и туловища может наблюдаться у пациентов с закрытыми глазами, в то время как неспособность удерживать тело может привести к постепенному сгибанию позы во время ходьбы. Кроме того, нарушения осанки туловища, ее динамика и вариабельность во время ходьбы могут различаться для идиопатической и паркинсонической камптокормии, что предполагает участие различных физиопатологических механизмов, лежащих в основе этой болезни (de Sèze et al., 2015). Кроме того, регулировка осанки туловища также может зависеть от условий ходьбы, например, при ходьбе вперед или назад (Иваненко и др., 2013). Эти нарушения связаны в первую очередь с автоматическим, а не произвольным контролем позы (Wright et al., 2007; Иваненко и др., 2013). Уровень тонической мышечной активности существенно влияет на ориентацию позы (Martin, 1967; Kluzik et al., 2005; Wright, 2011) и неотъемлемо включен в контроль походки (Mori, 1989).
Таким образом, центральная нервная система способна сочетать подвижность со стабильностью, а характер взаимодействия между позой и движением является давней проблемой в двигательной нейробиологии.Последний аспект лучше всего описал Шеррингтон (1906) более века назад: «поза следует за движением, как тень». Он даже предвидит движение. Тонизирующая мышечная активность и контроль осанки требуют специализированных нейронных схем. Правильный постуральный тонус является неотъемлемой частью любого движения, и нарушение мышечного тонуса может, в свою очередь, повлиять на выполнение движений. Чтобы понять, как контролировать позу и движения, нам нужно лучше знать, как создается и поддерживается постуральный тонус, включая его нервно-мышечные основы.
Контроль осанки человека
Abstract
С древней Греции до наших дней исследования контроля осанки основывались и формировались на основе многих концепций. Контроль равновесия часто считается частью контроля позы. Тем не менее, в системе постурального контроля становятся все более очевидными два разных уровня: один уровень задает распределение тонической мышечной активности («поза»), а другой назначается для компенсации внутренних или внешних возмущений («равновесие»). Хотя эти два уровня по своей сути взаимосвязаны, как нейрофизиологические, так и функциональные соображения указывают на различные нервно-мышечные основы.Нарушения мышечного тонуса, в свою очередь, могут повлиять на двигательную способность. Уникальная структура, специализация и свойства скелетных мышц также должны быть приняты во внимание для понимания важных периферийных факторов, влияющих на постуральную регуляцию. Здесь мы рассмотрим нейромеханическую основу привычной позы и различные концепции, которые оказали большое влияние на многие экспериментальные исследования и математические модели управления позой человека.
Ключевые слова: контроль осанки, равновесие, мышечный тонус, постуральные рефлексы, мультисенсорные взаимодействия, схема постурального тела
Введение
Жизнь развивалась в присутствии силы тяжести, и с древней Греции до наших дней было признано, что осанка поддерживается тоническими мышечными сокращениями, действующими против силы тяжести и стабилизирующими положение сегментов тела.Греческий врач Гален из Пергама был, вероятно, первым, кто ввел понятие мышечного тонуса в своей работе «De motu musculorum» (Гален, 1549). Из клинических наблюдений давно известно, что поражение центральной нервной системы может приводить к выраженным изменениям осанки. Систематические экспериментальные исследования физиологических механизмов постуральной регуляции были начаты только столетие назад Шеррингтоном (1906, 1915) и получили дальнейшее развитие у Магнуса (Magnus and de Klein, 1912; Magnus, 1924) и Радемейкера (1931).Для понимания механизмов контроля баланса использовались различные биомеханические и нейрофизиологические подходы (Horak and Macpherson, 1995).
Мы начинаем этот обзор с влиятельной схемы управления вертикальной позой, основанной на идее перевернутого маятника и наличия колебаний центра давления (ЦД) как важной меры устойчивости позы. В упрощенной модели вертикального положения человека с перевернутым маятником центр массы тела (ЦМ) является единственной контролируемой переменной (Winter et al., 2003). При спокойном стоянии CoP колеблется по обе стороны от CoM, чтобы удерживать его в довольно постоянном положении между двумя ногами (рисунок). Поскольку центр масс тела (ЦМ) расположен относительно высоко (в туловище, на ~ 1 м выше щиколоток, что определяет длину перевернутого маятника), а основание опоры относительно невелико, поза по своей природе нестабильна. Соответственно, можно сделать вывод, что чем выше расположение CoM, тем больше колебания CoP. Однако это утверждение является упрощением и вводит в заблуждение.Например, на рисунке показаны типичные примеры центра колебаний давления во время спокойного стояния у кошки, собаки и человека. Обратите внимание на аналогичные колебания ЦО (~ 1-2 см), несмотря на существенные различия в высоте центра масс над опорой. Сравнимое (~ 1 см CoP) раскачивание тела наблюдалось также у лошадей (Clayton and Nauwelaerts, 2014) и у крыс (~ 2 см CoP), обученных стоять на двух ногах (Sato et al., 2015). Поэтому простая схема «чем ниже CoM, тем меньше колебания CoP» обманчива или, по крайней мере, не может быть распространена на животных разного размера.Кроме того, амплитуда колебаний CoP намного меньше, чем фактическая база опоры (схематически изображенная на рисунке, средние панели), и, вероятно, обеспечит стабильность, даже если она будет больше.
Колебания центра давления (ЦД) при спокойном стоянии у кошки (A) , собаки (B) и человека (C) . Примеры трассировок CoP (внизу) адаптированы из MacPherson and Horak (2012) с разрешения в (A) , перерисованы из Brookhart et al.(1965) в (B) и модифицировано из Ivanenko et al. (1999) в (C) . Размер основания опоры схематично изображен на средних панелях. Обратите внимание на сопоставимые колебания ЦМ (~ 2 см) у четвероногих относительно человека, несмотря на 5-кратную разницу в высоте центра масс над опорой.
Таким образом, важно подчеркнуть, что простые биомеханические соображения могут объяснить поведение позы лишь до некоторой степени. Кроме того, колебания ЦС отражают только оперативный уровень контроля позы, связанный со стабилизацией ориентации определенных постуральных сегментов тела.Однако каковы принципы, определяющие привычные конфигурации позы и тоническую мышечную активность вдоль оси тела? Постуральный тонус (часто связанный с антигравитационной поддержкой) представляет собой тоническую активацию мышц, чтобы обеспечить определенное положение тела и создать силу, отталкивающуюся от земли, чтобы конечности оставались вытянутыми. Привычная поза варьируется у разных животных и может включать вытянутые конечности или полусогнутую позу. Антигравитационная поддержка у людей частично обеспечивается пассивными силами костей в суставах, растянутых связках и мышцах, но также требует активного сокращения в разгибателях нижних конечностей, туловища и шеи.Управление тонусом позы непросто и требует специализированных нейронных схем. Требуется подробная информация об основных нейронных цепях, а также о лежащих в основе клеточных процессах, обеспечивающих длительную мышечную силу и жесткость. Стоит отметить, что осанка у разных людей определяется как индивидуальной морфологией, так и специфической низкоуровневой мышечной активностью, на которую также могут существенно влиять различные патологические состояния. Интеграция нескольких сенсорных и моторных областей развивалась на протяжении миллионов лет эволюции жизни с целью обеспечения точного регулирования ориентации тела в гравитационном поле.
Здесь мы рассматриваем экспериментальные проблемы, которые влияют на то, как мы определяем и рассматриваем механизмы мышечного тонуса и постуральной регуляции. В первом разделе мы кратко обсуждаем структурную и функциональную сложность постуральных мышц, потому что любое размышление о мышечном тонусе и его контроле должно учитывать знание уникальной структуры и свойств скелетных мышц. В следующих разделах мы обсуждаем идеи и подходы, которые представляют или представляют важные концептуальные основы для исследования контроля за позой человека.
Структурная и функциональная сложность постуральных скелетных мышц
Структура и функция скелетных мышц позволяют выполнять широкий спектр действий, от быстрого создания силы и движения до длительного поддержания ориентации сегментов тела относительно силы тяжести. Кроме того, специфическая для задачи активация функционально различных типов мышечных волокон, составляющих данную мышцу, может обеспечить богатый набор мышечных сокращений и выработку энергии. Постуральный тонус обычно рассматривается как мышечное напряжение низкого уровня, наблюдаемое как в дистальных, так и в проксимальных (туловище и шея) скелетных мышцах.Тем не менее, нельзя размышлять о постуральном тонусе, рассматривая только нервный сигнал от подкорковых и корковых структур. Недавние биохимические и биомеханические данные заставили серьезно переоценить структурную и функциональную сложность мышц (Knight, 2016). В частности, теория скользящих нитей для мышечного сокращения была расширена за счет включения регуляторных и цитоскелетных белков, которые отвечают за вязкоупругие свойства мышц и экономию производства силы — ключевые периферические вклады в постуральную регуляцию.
Теория скользящих филаментов основана на модели, в которой актиновые и миозиновые филаменты скользят друг мимо друга, и была введена в 1954 году независимо двумя группами (Huxley and Hanson, 1954; Huxley and Niedergerke, 1954). Хью Хаксли формально предложил механизм скольжения нити, который получил название поперечно-мостовой модели. Согласно его модели, скольжение филаментов происходит за счет циклического прикрепления и отсоединения миозина от актиновых филаментов. Сокращение происходит, когда миозин тянет актиновую нить к центру полосы А, отделяется от актина и создает силу (удар) для связывания со следующей молекулой актина.Однако современные взгляды на механизм сокращения мышц включают три скользящих филамента, а именно актин, миозин и тайтин (Knight, 2016). Важно отметить, что, помимо связей с сарколеммой через Т-канальцы и саркоплазматический ретикулум, саркомеры связаны другими внесаркомерными структурами цитоскелета на Z-диске и M-полосе. Эта структура претерпевает обратимые осевые и поперечные конформационные изменения в сжимающемся саркомере. Саркомерная структура цитоскелета играет ключевую роль в теории скользящих филаментов (Gautel and Djinović-Carugo, 2016).
В контексте постуральной функции скелетных мышц и стабилизации сегментов тела, эластические свойства скелетной мускулатуры и мышечное напряжение тесно связаны с регуляторными и цитоскелетными белками. Несмотря на то, что постуральная мышечная активность довольно мала, стоит подчеркнуть, что любая поза не является пассивной, и специфическая малая активность мышц шеи, туловища и конечностей определяет напряжение покоя, осевой тонус, индивидуальные позы, выражение лица и т. Д. (Jankovic, 2003 ; Гурфинкель и др., 2006; Райт и др., 2007; Caneiro et al., 2010). Длительное поддержание постуральной мышечной активности (минуты или даже часы) связано с низкими энергетическими затратами. Постуральная активность обычно задействует медленные мышечные волокна, которые более устойчивы к утомлению. Как управлять этим механизмом во время позы и небольших движений, которые часто присутствуют при поддержании позы? В дополнение к избирательной активации соответствующих мышечных волокон, малоизученный, но интригующий аспект постурального мышечного тонуса включает в себя механизмы эластичности мышц, увеличения силы и сохранения энергии.
Например, статическая жесткость зависит от кальций-зависимой жесткости активированных волокон, независимо от образования поперечных мостов, и тайтин, по-видимому, обладает всеми характеристиками, необходимыми для учета свойств статической жесткости (Colombini et al., 2016). Увеличение силы также может быть результатом взаимодействия между эластичным элементом в мышечных саркомерах и поперечными перемычками, которые, в свою очередь, взаимодействуют с эластичными элементами, регулируя их длину и жесткость. Мышечная модель, основанная на гипотезе извилистой нити, может предсказать увеличение остаточной силы в мышцах (Nishikawa, 2016).Гигантский белковый небулин является одним из важных регуляторных белков, и было предложено использовать его в качестве «молекулярного регулятора» для определения длины тонких нитей, которые играют роль во многих клеточных процессах, включая регуляцию мышечного сокращения, вязкоупругие свойства, Z- формирование диска и сборка миофибрилл (Chu et al., 2016). Взаимодействие между тайтином и небулином все еще не определено. Наконец, зависимые от употребления изменения в составе мышечных волокон (Hoppeler, 2016) и прогрессирующее уменьшение времени сокращения мышц в процессе развития ребенка наряду с созреванием центральной нервной системы, контролирующей позу и движения (Dayanidhi et al., 2013) отражают функциональные преимущества такого постоянного созревания и указывают на важную роль фенотипической пластичности мышц. Вышеупомянутые темы традиционно игнорировались, хотя прогресс в выяснении молекулярных механизмов сокращения мышц открывает новые возможности для понимания важных периферийных факторов, влияющих на постуральную регуляцию и пластичность мышц.
Концептуальные основы и подходы к исследованию постурального контроля
Вертикальное двуногое положение традиционно описывается как зависящее от сенсорных (зрительных, вестибулярных и соматосенсорных) сигналов, обеспечивающих постуральное равновесие и правильное выравнивание сегментов тела относительно силы тяжести.Природа мультисенсорных взаимодействий была предметом множества исследований. С концептуальной точки зрения ниже мы рассмотрим три мифа о постуральной регуляции, которые оказали большое влияние на многие экспериментальные исследования и математические модели управления позой человека: (1) система контроля осанки является линейной, (2) контроль осанки определяется рефлексы, и (3) контроль позы — это контроль равновесия.
Нелинейные свойства системы контроля осанки
Небольшие движения сопровождают поддержание любой позы.Обычно, если человеческая осанка нестабильна, колебания сегментов тела не превышают 1–2 ° движений суставов, а колебания ЦС составляют около 1–2 см. Тот факт, что осцилляции осанки малы, подтверждает предположение о том, что система является линейной в ограниченном диапазоне движений, и, следовательно, можно применять линейные вычислительные модели и анализ (Winter et al., 2003; Mergner, 2007; Kiemel et al., 2008; Асслендер, Петерка, 2014). Хотя это предположение до некоторой степени справедливо, и многие исследования предоставили очень важную информацию о стратегиях осанки и вкладе различных сенсорных сигналов в контроль баланса, следует иметь в виду, что существует также существенная нелинейность в системе контроля осанки, а именно: часто упускается из виду.
Во-первых, некоторая нелинейность существует уже на уровне мышц, так как их устойчивость к небольшим угловым возмущениям (~ 1 °, соответствует примерно 1% изменениям длины мышечных волокон, так называемая жесткость короткого диапазона , Rack and Westbury, 1974) намного выше, чем устойчивость к более сильным возмущениям. Даже несмотря на то, что жесткости активных мышц голени на коротких дистанциях может быть недостаточно для полной компенсации раскачивания тела во время спокойного стояния (Morasso and Schieppati, 1999; Loram et al., 2007), его вклад определенно существенен (Gurfinkel et al., 1995). Тиксотропия скелетных мышц (Gurfinkel et al., 1989a) дополнительно способствует увеличению жесткости мышц в зависимости от времени для длительных постуральных движений. Действительно, компонент жесткости на коротком расстоянии меньше в периоды сильного постурального колебания. Таким образом, наблюдается значительное снижение (до 43%) внутренней жесткости голеностопного сустава в условиях повышенного базового раскачивания (Sakanaka et al., 2016), что свидетельствует о значительном влиянии истории раскачивания.Интрафузальные волокна мышечных веретен также демонстрируют тиксотропное поведение, что подразумевает усиление проприоцепции, связанное с анамнезом (Proske et al., 1993). В целом, игнорирование нелинейной зависимости жесткости голеностопного сустава от величины раскачивания может привести к серьезной неверной интерпретации результатов экспериментов, в которых используются механические возмущения или сенсорные манипуляции, такие как закрытие глаз, подвижные или нестабильные опорные поверхности, привязка к раскачиванию и т. Д. ( Loram et al., 2007).
Во-вторых, поскольку осцилляции осанки небольшие, внутри тела происходят значительные нелинейные перераспределения внутренних смещений мышечных волокон, сухожилий и мягких тканей.Например, из-за податливости ахиллова сухожилия наблюдается парадоксальное укорачивание камбаловидной и икроножной мышц, когда тело наклоняется вперед, и удлинение, когда тело возвращается, оставляя неопределенной постуральную роль многочисленных веретен икроножных мышц в обнаружении колебаний тела (Loram и др., 2004). Кроме того, контроль равновесия и внутренних смещений (мышечных волокон, связок и мягких тканей) не ограничивается дистальными суставами. Например, нарушения осанки могут возникать в результате дыхательных движений грудной клетки и живота и должны компенсироваться движением нижних конечностей и таза (Hodges et al., 2002). Кроме того, для стабилизации позы требуется постоянная активность осевых мышц для стабилизации туловища (и головы) и, при необходимости, для компенсации движений дистальных частей тела. Наконец, человеческая стопа при спокойном стоянии подвергается значительным деформациям из-за небольших смещений СоМ и деформаций мягких тканей и свода стопы. Стоит подчеркнуть, что вертикальные колебания пяточной кости (и передней части стопы) примерно на 0,5 мм, наблюдаемые при спокойном стоянии у здоровых взрослых людей (Gurfinkel et al., 1994) производят наклон тела примерно на 0,5 ° (смещения КП на 0,7 см) даже при отсутствии смещений голеностопного сустава. Ожидается, что у маленьких детей эти деформации и их влияние на контроль осанки будут еще больше, поскольку стопа ребенка претерпевает значительные изменения формы и мягких тканей подошвы в процессе развития (например, наличие жировой подушечки под подошвенной поверхностью стопы. у младенцев), когда ребенок начинает стоять и ходить. Более того, развитие костной структуры продольной дуги начинается только через ~ 1 год после рождения и продолжается до 5 лет (Straus, 1926; Maier, 1961).Постуральная активность многочисленных внутренних мышц стопы (которая, как правило, не регистрируется в исследованиях осанки) дополнительно способствует пластичности стопы человека. Также есть большие индивидуальные различия в деформациях стопы. Эти деформации приводят к большим ошибкам в измеренных изменениях угла голеностопного сустава, а даже незначительные локальные деформации стопы вызывают заметные направленные постуральные реакции (Gurfinkel et al., 1994; Wright et al., 2012). Однако многие постуральные исследования, как правило, сосредоточены на простом шарнирном действии голеностопного сустава (Gatev et al., 1999; Масани и др., 2003; Винтер и др., 2003; Мергнер, 2007).
Обработка колебаний CoP подразумевает определенную степень нелинейности. Контроль вертикальной позы во время спокойного стояния часто исследовался путем количественной оценки спонтанного постурального колебания в областях смещения, скорости и частоты. Тем не менее, анализ и интерпретация результатов следует проводить осторожно, поскольку методика обработки данных может повлиять на структуру изменчивости ЦС (Rhea et al., 2015). Кроме того, сходные амплитуды колебаний ЦС у разных животных (рисунок) поднимают важный вопрос об их нормировании на рост, массу тела и размер основания опоры. Может ли это отражать эволюционно принятый сенсорный порог для контроля постурального колебания? Действительно, несмотря на различия в размерах тела, проприоцептивные пороги (для мышечных веретен, суставов и рецепторов нагрузки), скорости нервной проводимости и типы мышечных волокон у наземных млекопитающих схожи, что позволяет предположить, что простое масштабирование размеров не может применяться при сравнении сенсомоторной контроль между видами (More et al., 2010). Каким бы ни был точный механизм сопоставимых осцилляций ЦО (рисунок), вклад, вероятно, будут иметь как механические, так и нервные факторы (Gatev et al., 1999; Masani et al., 2003; Winter et al., 2003; Di Giulio et al., 2009). ; Симоно, Тисдейл, 2015). Эти соображения также важны для исследований развития. Например, колебания ЦС подобны или больше (но никогда не меньше) у маленьких детей по сравнению с взрослыми людьми, несмотря на более чем 2-кратную разницу в росте (Oba et al., 2015). В некоторой степени они могут быть объяснены развитием у детей устойчивости позы. Однако нам неизвестен квант колебаний ЦО, связанный с нестабильностью, и какая пропорция может быть скорректирована с помощью «неизвестной» процедуры нормировки. Другими словами, мы не уверены в том, следует ли и каким образом нормализовать амплитуду ЦС по росту для одного и того же животного в разном возрасте развития.
Существуют также другие нелинейные свойства сенсомоторной системы, включая пороги (например,g., для вестибулярной стимуляции), задержки проприоцептивной обратной связи и нервно-мышечной задержки производства силы. Нелинейная геометрия скелетно-мышечных связей (например, зависимость моментного плеча мышц от угла сустава) вносит свой вклад в нелинейные свойства сенсомоторной системы, хотя этот тип нелинейности более заметен во время относительно больших движений или постуральных движений. возмущения или при изменении позы. Мы не будем здесь рассматривать многочисленные постуральные модели и будем ссылаться на другие статьи, связанные со стратегией нелинейного управления, включая взрывоподобную активацию мышц, особенно наблюдаемую в нестабильных условиях.Было даже высказано предположение, что прерывистое управление разомкнутым контуром может быть подходящим решением для борьбы с временными задержками обратной связи, моторным шумом и вычислительно-мышечной экономией (Loram et al., 2011). Смена парадигм в будущих экспериментальных или модельных исследованиях может быть связана с развитием нелинейных подходов (Loram et al., 2011; Nomura et al., 2013; Funato et al., 2016), хотя сложность модели может ценою понимания. Эти ограничения приводят к необходимому компромиссу между использованием линейных подходов и более сложных моделей осанки.Тем не менее, даже если мы для простоты применяем линейные вычисления (например, Kiemel et al., 2008; Assländer and Peterka, 2014), мы должны иметь в виду значительную нелинейность в нервно-мышечном контроле позы.
Контроль осанки как сумма постуральных рефлексов
Ранние постуральные исследования делали акцент на рефлекторной природе постуральных механизмов и приводили различные важные примеры статических постуральных реакций (Магнус, 1924; Робертс, 1978). Идея рефлексов растяжения, сенсорной (проприоцептивной, зрительной и вестибулярной) обратной связи и ее нарушения при различных формах патологии спинного мозга, ствола мозга и мозжечка в сочетании с разработанной позднее концепцией серворегуляции сыграла важную роль в оценке и моделировании. контроля осанки человека.
С другой стороны, было понято, что понятие постуральных рефлексов довольно ограничено, чтобы учесть фактическую сложность контроля позы, которая включает упреждающие или упреждающие корректировки, контекстно-зависимые сенсомоторные (или «рефлекторные») модуляции, постуральные схема тела и интеграция позы и движений (Massion, 1994). Примечательной иллюстрацией постуральной схемы тела является модуляция автоматических постуральных реакций (например, в ответ на гальваническую вестибулярную стимуляцию, вибрацию мышц или постуральное возмущение) в соответствии с иллюзорным, а не реальным положением головы или сегментов тела (Gurfinkel, 1994). ).Существует несколько техник, позволяющих искусственно вызвать диссоциацию между реальной и воспринимаемой конфигурацией тела: вызывая проприоцептивные иллюзии, используя феномен «возврата» субъективного положения головы в нейтральное положение после длительного поворота или гипнотическое внушение. Все эти техники показывают сходное влияние на пространственно-ориентированные постуральные реакции на сенсорную стимуляцию. Изменения направления взгляда также могут модулировать постуральные реакции (Иваненко и др., 1999), что согласуется с супраспинальными или когнитивными влияниями на контроль позы, вероятно, потому, что взгляд представляет собой важную опорную систему для внутренней модели пространственной ориентации.Таким образом, тот факт, что автоматические постуральные реакции осуществляются в соответствии с внутренней репрезентацией схемы тела (Попов и др., 1986; Сметанин и др., 1988; Гурфинкель, 1994), указывает на то, что они служат не только для сознательного восприятия положения, но и это также основа для планирования и реализации двигательной активности. Контроль баланса как во время стояния, так и во время движений зависит от сложного взаимодействия физиологических механизмов, обработки сенсорной информации на высоком уровне в соответствии со схемой постурального тела, а также от ожиданий, целей, когнитивных факторов и предшествующего опыта человека.Элементы схемы тела существуют уже на уровне спинного мозга и вносят вклад в обработку сенсорной информации и постуральных реакций (Fukson et al., 1980; Windhorst, 1996; Poppele and Bosco, 2003). Понятие схемы тела привлекло внимание в широком контексте современного моторного контроля для понимания адаптируемости рефлекторной модуляции, ряда процессов, таких как оценка состояния, прогнозирование, обучение, а также для преодоления разрыва между когнитивными и моторными функциями (Gurfinkel, 1994). ; Маравита, Ирики, 2004; Виндхорст, 2007; Пирсон, Грамлих, 2010; Иваненко и др., 2011; Макферсон и Горак, 2012; Херцфельд и Шадмер, 2014).
В целом, контроль позы больше не считается одной системой или данным набором равновесных рефлексов, а скорее моторным навыком (Horak and Macpherson, 1995). Многие исследования сосредоточены на количественной оценке усиления рефлексов конкретных нервных путей, таких как рефлекс Хоффмана, местных рефлексов растяжения в отдельных суставах, моторных вызванных потенциалов и т. Д., Или применении определенного теста на равновесие. Они предоставляют знания о возбудимости этих путей в конкретных условиях.Однако представление о том, что за контроль позы отвечают несколько путей или центров в мозге, весьма ограничивает наши способности оценивать риски падения и улучшать равновесие. Кроме того, корковое вовлечение высокого уровня увеличивается по мере увеличения постуральных проблем или требований реактивного контроля (Ouchi et al., 1999; Solopova et al., 2003; Varghese et al., 2015). С точки зрения диагностики и реабилитации, « необходимо оценить многие системы, чтобы понять, что не так с балансом человека» (Horak, 2006).
Контроль осанки и контроль равновесия
Во многих статьях по контролю осанки обычно утверждается, что сенсорная информация от соматосенсорной, вестибулярной и зрительной систем объединяется для поддержания равновесия (Фитцпатрик и Макклоски, 1994; Блуин и др., 2007; Мергнер) , 2007; Assländer, Peterka, 2014; Chiba et al., 2016). Соответственно, большая часть последовательных исследований, посвященных постуральному равновесию, изучает, как сенсорные входы повторно взвешиваются или как нейронные стратегии меняются в различных ситуациях для контроля баланса и постуральных реакций на возмущения (Nashner, 1976; Ivanenko et al., 1997; Jeka et al., 2004; Швейгарт и Мергнер, 2008; Нардоне и Шиппати, 2010; Симоно и Тисдейл, 2015; Balestrucci et al., 2017). Однако система контроля позы должна решать две задачи одновременно: одна задает распределение тонической мышечной активности («поза»), а другая предназначена для компенсации внутренних или внешних возмущений («равновесие»). Эквивалентны ли эти две задачи?
Начнем с того, что контроль движения и поддержание фиксированной позы конечности после движения (удержание части тела в месте назначения) включает различные нервные цепи в стволе мозга, мозжечке, моторной коре, гиппокампе и т.(Шадмер, 2017). Например, многие нейроны первичной моторной коры, которые выражают связанную с нагрузкой активность, задействованы исключительно во время либо только позы, либо только движения, то есть они по-разному реагируют на временные и постоянные нагрузки, прикладываемые во время позы (Kurtzer et al., 2005; Herter et al., др., 2009). Было высказано предположение, что необходимость наличия «цепи удержания» могла возникнуть из-за необходимости поддерживать постоянное «сенсорное состояние», в то время как контуры, отвечающие за перемещение части тела, изменяют ее сенсорное состояние.Поскольку две задачи (движение и неподвижность) по своей сути взаимосвязаны, между этими контурами также существует перекрытие и взаимодействие. Тем не менее они существенно различаются. Нейрофизиологические данные по различным модальностям, касающимся контроля взгляда, движений головы, движений рук, позы и локомоций, показывают, что отдельные интернейроны и мотонейроны демонстрируют всплески активности во время переходных движений по сравнению с устойчивым уровнем разряда во время поддержания позы (Shadmehr, 2017).Соответственно, аналогичная концепция может быть применена к контролю фазической и тонической постуральной мышечной активности. Что касается постурального тонуса, то он исходит из нескольких надспинальных центров, включая ретикулярную формацию, вестибулярные ядра, мозжечок и мезодиэнцефальные ядра (Hess, 1954). Эти области мозга могут проявлять устойчивую длительную активность, обеспечивая длительное возбуждение и торможение исполнительных моторных систем. Кроме того, существуют также специализированные пути к спинному мозгу (Kuypers, 1964; Szokol, Perreault, 2009; Deliagina et al., 2014) и специализированная активация мускулатуры туловища при выполнении различных постуральных и моторных задач (Urquhart et al., 2005; Falgairolle et al., 2006, 2013; Tsao et al., 2011; Beliez et al., 2015). Например, нисходящие пути к осевой мускулатуре (которая связывает все части тела вместе и обеспечивает осевой мышечный тонус и стабилизацию туловища) через соматический нисходящий ствол мозга, а моноаминергические пути отличаются от нисходящих путей к мотонейронам конечностей (Kuypers, 1964; Szokol и другие., 2008; Sivertsen et al., 2014).
Медленные и быстрые процессы в центральной нервной системе также часто связаны с контролем мышечного тонуса и фазовой мышечной активности. Например, различные постуральные последствия связаны с медленными изменениями тонической мышечной активности (Gurfinkel et al., 1995; Kluzik et al., 2005; Bove et al., 2009; Wright, 2011). В некоторых условиях контроль, связанный с осанкой и связанный с равновесием, может быть дифференцирован в отношении медленных и быстрых компонентов смещения ЦО, соответственно.Например, участники с закупоренным видением проходит очень медленно (<0,1 ° / с) наклонами опорной платформы, подпороговый для большинства реакций вестибулярных и проприоцептивных фазических, дисплей очень больших компенсаторных сдвигов фазы и задержек (десятки секунд). Однако стоит отметить, что на большие медленные движения тела накладываются небольшие нерегулярные колебания, отражающие постоянный контроль равновесия (Gurfinkel et al., 1995). Таким образом, помимо оперативного управления, предназначенного для компенсации отклонений от исходного положения, система постурального контроля включает как минимум один дополнительный уровень, который разрабатывает этот постуральный «набор» с учетом затрат энергии на стояние, положения сегментов тела, мышечных моментов и т. Д. требования стабильности и безопасности.С функциональной точки зрения, это может решить старый парадокс движения и осанки , введенный известным немецким ученым Эрихом фон Хольстом (1908–1962): как мы можем переходить из одной позы в другую, не вызывая сопротивления со стороны стабилизации позы. механизмы. Если кто-то считает, что поза и равновесие опосредуются отдельными нервными цепями, механизмы стабилизации позы могут быть ответственны за контроль равновесия по сравнению с определенным выше постуральным набором.
В основе привычной позы человека сидя или стоя лежит постуральный тонус скелетных мышц.Фазическая активность часто бывает произвольной (хотя она также может быть автоматической), тогда как тоническая непроизвольная активность менее известна и гораздо менее изучена. Существуют методические трудности, поскольку активность многих мышц (например, туловища) довольно мала. Под наркозом мышечный тонус исчезает, а тоническая активность может наблюдаться во время сна, поскольку есть некоторые активные фазы, сопровождающиеся мышечными тоническими сокращениями (Harris, 2005; Peever, 2011; Huon and Guilleminault, 2017). Среди важных примеров длительной непроизвольной активности — тонический вибрационный рефлекс (Eklund and Hagbarth, 1966) и непроизвольная мышечная активность после сокращения (Salmon, 1914; Kohnstamm, 1915), которые, как предполагалось, отражают усиление нейромоторных процессов, обычно участвующих в автоматических процессах. поддержание осанки и тоническая активность позвоночника (De Havas et al., 2017; Иваненко и др., 2017).
Важным вопросом является оценка и определение мышечного тонуса (Gurfinkel et al., 2011), который традиционно связан с уровнем мышечной активности. В клинической практике изменения тонуса обычно измеряются, а не тонус как таковой , по степени сопротивления мышц растяжению. Однако изменение длины мышц может также вызвать непроизвольные реакции сокращения (поведение податливой позы) или вызвать корректировку положения других «удаленных» мышц, которые не растягиваются в первую очередь (Andrews et al., 1972; Гурфинкель и др., 1989b). Динамический «постуральный фрейм», который неотъемлемо включен в осанку и координацию движений, может объяснять сопротивляющееся или послушное поведение тела (Cacciatore et al., 2014). В этом отношении интерпретация мышечного тонуса Бернштейном (1940) кажется более функциональной, поскольку степень готовности к движению, связанная с движением, как состояние связано с действием или как предварительное условие связано с действием. Изменения мышечного тонуса влияют на движения.Замечательные открытия британского невролога Мартина (1967) являются прекрасными примерами того, как нарушение постурального тонуса у людей влияет на способность выполнять движения. Например, потеря нормальной позы головы и туловища может наблюдаться у пациентов с закрытыми глазами, в то время как неспособность удерживать тело может привести к постепенному сгибанию позы во время ходьбы. Кроме того, нарушения осанки туловища, ее динамика и вариабельность во время ходьбы могут различаться для идиопатической и паркинсонической камптокормии, что предполагает участие различных физиопатологических механизмов, лежащих в основе этой болезни (de Sèze et al., 2015). Кроме того, регулировка осанки туловища также может зависеть от условий ходьбы, например, при ходьбе вперед или назад (Иваненко и др., 2013). Эти нарушения связаны в первую очередь с автоматическим, а не произвольным контролем позы (Wright et al., 2007; Иваненко и др., 2013). Уровень тонической мышечной активности существенно влияет на ориентацию позы (Martin, 1967; Kluzik et al., 2005; Wright, 2011) и неотъемлемо включен в контроль походки (Mori, 1989).
Таким образом, центральная нервная система способна сочетать подвижность со стабильностью, а характер взаимодействия между позой и движением является давней проблемой в двигательной нейробиологии.Последний аспект лучше всего описал Шеррингтон (1906) более века назад: «поза следует за движением, как тень». Он даже предвидит движение. Тонизирующая мышечная активность и контроль осанки требуют специализированных нейронных схем. Правильный постуральный тонус является неотъемлемой частью любого движения, и нарушение мышечного тонуса может, в свою очередь, повлиять на выполнение движений. Чтобы понять, как контролировать позу и движения, нам нужно лучше знать, как создается и поддерживается постуральный тонус, включая его нервно-мышечные основы.
Что такое постуральный контроль? Почему это важно? — Сенсационное развитие
Что такое постуральный контроль? Почему это важно?
Едите ли вы за обеденным столом или садитесь в машину, ваша поза используется в качестве опоры, помогающей поддерживать вертикальное положение и выравнивание во время выполнения этих задач против силы тяжести. Постуральный контроль можно определить как «действие по поддержанию, достижению или восстановлению состояния равновесия во время любой позы или деятельности» (Nichols, 1996).Хотя контроль позы — это процесс развития, это не означает, что он у всех развивается нормально. Развитие осанки важно с точки зрения наличия соответствующих мышц, позволяющих удерживать себя в нужном положении, но это характерно не для всех.
Некоторые признаки плохого контроля осанки включают:
· Сидение на стуле в сутулом положении.
· Опираясь на стол, чтобы получить поддержку в сидячем положении.
· Частые падения в сидячем положении.
· Проблемы с оборудованием игровых площадок, таким как горки, шесты, пилы и качели.
- Ходьба с широкой опорой и сидение в широкоугольном положении W.
Согласно Маргарет Руд и ее теории, важным аспектом контроля позы является развитие антигравитационных движений. Она предложила четырехэтапную последовательность в развитии движения: 1) подвижность, 2) стабильность, 3) подвижность, совмещенная со стабильностью, и 4) навыки. Эта теория описывает, каким образом наша стабильность и проксимальная подвижность должны развиваться в первую очередь для поддержания позы с опорой на вес тела и смены положений.Когда наше тело стабилизируется, а мышцы становятся достаточно сильными, чтобы выдерживать вес, это когда более дистальные движения (руки, ноги и т. Д.) Используются для выполнения умелых задач.
развитиеосанки связано с экспериментальными и созревания изменений в сенсомоторной, опорно-двигательного аппарата и когнитивных систем; любая из этих систем может привести к нетипичному развитию осанки. Примером задачи, для которой важен контроль осанки, является посещение туалета. Прежде чем дети самостоятельно сядут на унитаз, они должны почувствовать себя уверенно.Еще одна задача, для которой важен контроль осанки и проксимальная стабильность, — это почерк. Часто дети с плохим почерком часто демонстрируют плохую проксимальную стабильность.
Мероприятия по стимулированию сокращения шеи, плеч, локтей и запястий у маленьких детей включают:
o прогулки с животными, такие как прогулки крабов, прогулки с медведями, змеиные ползания и т.д. письменная работа лежа на животике.
Детям старшего возраста могут нравиться такие упражнения, как упражнения с использованием резистивных предметов, таких как:
o повязки
o позы йоги, требующие нагрузки на верхние конечности.
o Перетягивание каната
Полезные советы:
· Измените положение тела вашего ребенка во время занятий, например стоять на коленях, чтобы сделать что-нибудь, опираясь на руки / локти, когда лежит на животе.
· При выполнении каких-либо действий убедитесь, что все столы и стулья находятся на правильной высоте. Их ступни должны стоять на полу, а колени и бедра — под углом 90 градусов. Их спина также должна быть прямой, а плечи расслабленными, когда предплечья лежат на поверхности стола.
-Marisa DiRienzo, OTS
Процессы постурального контроля во время стояния и начала шага при расстройстве аутистического спектра | Journal of Neurodevelopmental Disorders
Kohen-Raz R, Volkmar F, Cohen D. Постуральный контроль у детей с аутизмом. J Autism Dev Disord. 1992. 22 (3): 419–32.
PubMed Статья CAS PubMed Central Google Scholar
Memari AH, Ghanouni P, Gharibzadeh S., Eghlidi J, Ziaee V, Moshayedi P.Модели осанки у детей с расстройством аутистического спектра по сравнению с типично развивающимися детьми. Res Autism Spectr Disord. 2013; 7: 325–32.
Артикул Google Scholar
Миншью, Нью-Джерси, Сунг К., Джонс Б.Л., Фурман Дж. М.. Недостаточное развитие системы постурального контроля при аутизме. Неврология. 2004. 63 (11): 2056–61.
Артикул Google Scholar
Sacrey L-AR, Germani T, Bryson SE, Zwaigenbaum L.Достижение и хватание при расстройстве аутистического спектра: обзор недавней литературы. Фронт Neurol. 2014; 5: 6.
PubMed PubMed Central Статья Google Scholar
Fournier KA, Kimberg CI, Radonovich KJ, Tillman MD, Chow JW, Lewis MH, et al. Снижение статического и динамического контроля позы у детей с расстройствами аутистического спектра. Поза походки. 2010. 32 (1): 6–9.
PubMed PubMed Central Статья Google Scholar
Райнхарт, штат Нью-Джерси, Тонг Б.Дж., Брэдшоу Д.Л., Янсек Р., Энтикотт П.Г., МакГинли Дж. Функция походки при высокофункциональном аутизме и расстройстве Аспергера: доказательства поражения базальных ганглиев и мозжечка. Eur Детская подростковая психиатрия. 2006. 15 (5): 256–64.
PubMed Статья PubMed Central Google Scholar
Мартино Дж., Шмитц С., Ассайанте С., Блан Р., Бартелеми С. Нарушение корковой десинхронизации, связанной с событием, во время бимануального подъема груза у детей с аутичным расстройством.Neurosci Lett. 2004. 367 (3): 298–303.
PubMed Статья CAS PubMed Central Google Scholar
Шмитц К., Мартино Дж., Бартелеми С., Ассайанте С. Контроль моторики и дети с аутизмом: дефицит функции ожидания. Neurosci Lett. 2003. 348 (1): 17–20.
PubMed Статья CAS PubMed Central Google Scholar
Американская психиатрическая ассоциация, редактор.Диагностическое и статистическое руководство по психическим расстройствам (DSM-5®): American Psychiatric Publishing; 2013.
Google Scholar
Массион Дж. Система контроля осанки. Curr Opin Neurobiol. 1994. 4 (6): 877–87.
PubMed Статья CAS Google Scholar
Horak FB. Ориентация позы и равновесие: что нам нужно знать о нейронном контроле баланса, чтобы предотвратить падения.Возраст Старение. 2006; 35 (Дополнение 2): ii7 – ii11.
PubMed Статья Google Scholar
Crapse TB, Sommer MA. Следствие разряда по всему царству животных. Nat Rev Neurosci. 2008; 9 (8): 587.
PubMed PubMed Central Статья CAS Google Scholar
Subramanian K, Brandenburg C, Orsati F, Soghomonian JJ, Hussman JP, Blatt GJ. Базальные ганглии и аутизм — трансляционная перспектива.Autism Res. 2017; 10 (11): 1751–75.
PubMed Статья Google Scholar
van Beers RJ. Моторное обучение оптимально приспособлено к свойствам моторного шума. Нейрон. 2009. 63 (3): 406–17.
PubMed Статья CAS Google Scholar
Гез К., Хенинг В., Гордон Дж. Организация добровольного движения. Curr Opin Neurobiol. 1991; 1 (4): 664–71.
PubMed Статья CAS Google Scholar
Memari AH, Ghanouni P, Shayestehfar M, Ghaheri B. Нарушения постурального контроля у людей с расстройствами аутистического спектра: критический обзор современной литературы. Азиатский J Sports Med. 2014; 5 (3): e22963.
PubMed PubMed Central Статья Google Scholar
Моллой К.А., Дитрих К.Н., Бхаттачарья А. Стабильность осанки у детей с расстройством аутистического спектра. J Autism Dev Disord. 2003. 33 (6): 643–52.
PubMed Статья Google Scholar
Ван З., Халлак Р.Р., Конрой К.С., Уайт С.П., Кейн А.А., Коллинсворт А.Л. и др. Постуральная ориентация и процессы равновесия, связанные с усилением постурального колебания при расстройстве аутистического спектра (РАС). J Neurodev Disord. 2016; 8: 43.
PubMed PubMed Central Статья Google Scholar
Доумас М., Маккенна Р., Мерфи Б. Дефицит постурального контроля при расстройствах аутистического спектра: роль сенсорной интеграции. J Autism Dev Disord.2016; 46 (3): 853–61.
PubMed Статья Google Scholar
Riach CL, Starkes JL. Скорость смещения центра давления как индикатор систем контроля осанки у детей. Поза походки. 1994. 2 (3): 167–72.
Артикул Google Scholar
Винтер Д.А., Принц Ф., Фрэнк Дж.С., Пауэлл К., Забек К.Ф. Единая теория баланса A / P и M / L в спокойной позиции.J Neurophysiol. 1996. 75 (6): 2334–43.
PubMed Статья CAS Google Scholar
Ван З., Ньюэлл К.М. Динамика межстопной координации в спокойных позах стоя. Neurosci Biobehav Rev.2014; 47: 194–202.
PubMed Статья Google Scholar
Виленский Ю.А., Дамасио А.Р., Маурер Р.Г. Нарушения походки у пациентов с аутичным поведением. Arch Neurol.1981; 38: 646–9.
PubMed Статья CAS Google Scholar
Calhoun M, Longworth M, Chester VL. Модели походки у детей с аутизмом. Clin Biomech. 2011. 26 (2): 200–6.
Артикул Google Scholar
Радонович К.Дж., Фурнье К.А., Хасс С.Дж. Взаимосвязь между контролем позы и ограниченным повторяющимся поведением при расстройствах аутистического спектра.Front Integr Neurosci. 2013; 7: 28.
PubMed PubMed Central Статья CAS Google Scholar
Travers BG, Powell PS, Klinger LG, Klinger MR. Двигательные трудности при расстройстве аутистического спектра: взаимосвязь тяжести симптомов и устойчивости позы. J Autism Dev Disord. 2013; 43: 1568–83.
PubMed Статья Google Scholar
Стано Дж. Векслер сокращенная шкала интеллекта.Сан-Антонио, Техас: Психологическая корпорация; 1999.
Google Scholar
Lord C, Rutter M, Le Couteur A. Пересмотренное диагностическое интервью с аутизмом: исправленная версия диагностического интервью для лиц, осуществляющих уход за людьми с возможными распространенными нарушениями развития. J Autism Dev Disord. 1994; 24: 659–85.
PubMed Статья CAS Google Scholar
Лорд К., Раттер М., ДиЛавор П., Ризи С., Готэм К., Бишоп С. График диагностических наблюдений за аутизмом, (ADOS-2) модули 1–4. Западные психологические службы: Лос-Анджелес, Калифорния; 2012.
Google Scholar
Берумент С.К., Раттер М., Лорд К., Пиклз А., Бейли А. Скрининговая анкета на аутизм: диагностическая достоверность. Br J Psychiatry. 1999. 175 (5): 444–51.
PubMed Статья CAS PubMed Central Google Scholar
Рейли Дж. Л., Ленсер Р., Бишоп Дж. Р., Киди С., Суини Дж. Влияние фармакологического лечения на контроль движения глаз. Brain Cogn. 2008. 68 (3): 415–35.
PubMed PubMed Central Статья Google Scholar
Lanska DJ, Goetz CG. Разработка, внедрение и адаптация знаков Ромберга в XIX веке. Неврология. 2000. 55 (8): 1201–6.
PubMed Статья CAS PubMed Central Google Scholar
Прието TE, Myklebust JB, Hoffmann RG, Lovett EG, Myklebust BM. Меры устойчивости позы: различия между здоровыми молодыми и пожилыми людьми. IEEE Trans Biomed Eng. 1996. 43 (9): 956–66.
PubMed Статья CAS Google Scholar
Ван З., Джордан К., Ньюэлл К.М. Паттерны координации динамики стопы при контроле вертикального стояния. Mot Control. 2012; 16: 425–43.
Артикул CAS Google Scholar
Зимний DA. Баланс человека и контроль осанки при стоянии и ходьбе. Поза походки. 1995; 3: 193–214.
Артикул Google Scholar
Ван З., Магнон ГК, Уайт СП, Грин РК, Вайланкур, Делавэр, Москони М.В. У людей с расстройством аутистического спектра наблюдаются отклонения от нормы на начальном и последующем этапах точного захвата. J Neurophysiol. 2014; 113: 1989–2001.
PubMed PubMed Central Статья Google Scholar
Розенблюм М., Фирсов Г., Кууз Р., Помпе Б. Контроль осанки человека: эксперименты и моделирование силовой пластины. Нелинейный анализ физиологических данных: Springer; 1998. с. 283–306.
Google Scholar
Готэм К., Пиклз А., лорд С. Стандартизация оценок ADOS для измерения степени тяжести расстройств аутистического спектра. J Autism Dev Disord. 2009; 39: 693–705.
PubMed Статья PubMed Central Google Scholar
Бергер В., Триппель М., Дишер М., Дитц В. Влияние роста испытуемых на стабилизацию позы. Acta Otolaryngol. 1992; 112: 22–30.
PubMed Статья CAS Google Scholar
Киари Л., Рокки Л., Каппелло А. Стабилометрические параметры зависят от антропометрии и положения стопы. Clin Biomech. 2002. 17 (9–10): 666–77.
Артикул Google Scholar
Коэн Дж. Статистический анализ мощности для наук о поведении. 2-е изд. Хиллсдейл, Нью-Джерси: Эрлбаум; 1988.
Google Scholar
Москони М.В., Моханти С., Грин Р.К., Кук Э.Х., Вайланкур, Делавэр, Суини Дж.А. Нарушения моторного контроля с прямой связью и обратной связью указывают на дисфункцию мозжечка в расстройстве аутистического спектра. J Neurosci. 2015; 35 (5): 2015–25.
PubMed PubMed Central Статья CAS Google Scholar
Glazebrook CM, Gonzalez D, Hansen S, Elliott D. Роль зрения для онлайн-контроля движений ручного прицеливания у людей с расстройством аутистического спектра. Аутизм. 2009. 13 (4): 411–33.
PubMed Статья Google Scholar
Идзава Дж., Пекны С.Е., Марко М.К., Хасвелл С.К., Шадмер Р., Мостофски Ш. При СДВГ моторное обучение опирается на интегрированные сенсорные входы, но чрезмерно избирательно — на проприоцепцию в условиях аутистического спектра.Autism Res. 2012; 5: 124–36.
PubMed PubMed Central Статья Google Scholar
Трэверс Б.Г., Мейсон А.Х., Грубен К.Г., Дин Д.К., Маклафлин К. Стоячее равновесие на неустойчивых поверхностях у детей с аутичным спектром: влияние IQ. Res Autism Spectr Disord. 2018; 51: 9–17.
PubMed PubMed Central Статья Google Scholar
Баев К.В., Грин К.А., Марчиано Ф.Ф., Саманта Д.Е., Шеттер А.Г., Смит К.А. и др.Физиология и патофизиология кортико-базальных ганглиев – таламокортикальных петель: теоретические и практические аспекты. Prog Neuro-Psychopharmacol Biol Psychiatry. 2002. 26 (4): 771–804.
Артикул Google Scholar
Бастиан А.Дж., Мартин Т., Китинг Дж., Тач В. Мозжечковая атаксия: ненормальный контроль моментов взаимодействия в нескольких суставах. J Neurophysiol. 1996. 76 (1): 492–509.
PubMed Статья CAS PubMed Central Google Scholar
Иври Р. Б., Спенсер Р. М., Желязник Н. Н., Дидрихсен Дж. Мозжечок и хронометраж событий. Ann N Y Acad Sci. 2002. 978 (1): 302–17.
PubMed Статья PubMed Central Google Scholar
Palliyath S, Hallett M, Thomas SL, Lebiedowska MK. Походка у больных с мозжечковой атаксией. Mov Disord. 1998. 13 (6): 958–64.
PubMed Статья CAS PubMed Central Google Scholar
Бейли А., Лютерт П., Дин А., Хардинг Б., Джанота И., Монтгомери М. и др. Клинико-патологическое исследование аутизма. Мозг. 1998. 121 (5): 889–905.
PubMed Статья Google Scholar
Уитни Э.Р., Кемпер Т.Л., Бауман М.Л., Розен Д.Л., Блатт Дж. Клетки Пуркинье мозжечка уменьшаются в субпопуляции аутичного мозга: стереологический эксперимент с использованием кальбиндина-D28k. Мозжечок. 2008. 7 (3): 406–16.
PubMed Статья CAS Google Scholar
Хан А.Дж., Наир А., Кеун К.Л., Датко М.С., Линкольн А.Дж., Мюллер Р.А. Церебро-мозжечковая функциональная связь в состоянии покоя у детей и подростков с расстройством аутистического спектра. Биол Психиатрия. 2015; 78 (9): 625–34.
PubMed PubMed Central Статья Google Scholar
Oldehinkel M, Mennes M, Marquand A, Charman T, Tillmann J, Ecker C, et al. Измененная связь между мозжечком, зрительными и сенсорно-моторными сетями при расстройстве аутистического спектра: результаты продольного европейского проекта по аутизму EU-AIMS.Биол Психиатрия. 2019; 4 (3): 260–70.
Google Scholar
Mostofsky SH, Powell SK, Simmonds DJ, Goldberg MC, Caffo B, Pekar JJ. Снижение связности и активности мозжечка при аутизме во время выполнения двигательной задачи. Мозг. 2009; 132: 2413–25.
PubMed PubMed Central Статья Google Scholar
Hass CJ, Gregor RJ, Waddell DE, Oliver A, Smith DW, Fleming RP, et al.Влияние тренировки тайцзи на центр траектории давления во время начала походки у пожилых людей. Arch Phys Med Rehabil. 2004. 85 (10): 1593–8.
Hass CJ, Waddell DE, Fleming RP, Juncos JL, Gregor RJ. Инициирование походки и контроль динамического баланса при болезни Паркинсона. Arch Phys Med Rehabil. 2005. 86 (11): 2172–6.
PubMed Статья Google Scholar
Макгоф Э.Л., Келли В.Е., Уивер К.Э., Логсдон Р.Г., МакКарри С.М., Пайк К.С. и др.Лимбические и базальные ганглии нейроанатомические корреляты походки и исполнительной функции: пожилые люди с легкими когнитивными нарушениями и сохраненными когнитивными функциями. Am J Phys Med Rehab. 2018; 97 (4): 229–35.
Артикул Google Scholar
Льюис М.Х., Танимура Й., Ли Л.В., Бодфиш Д.В. Животные модели ограниченного повторяющегося поведения при аутизме. Behav Brain Res. 2007. 176 (1): 66–74.
PubMed Статья Google Scholar
Langen M, Durston S, Kas MJ, van Engeland H, Staal WG. Нейробиология повторяющегося поведения:… и мужчины. Neurosci Biobehav Rev.2011; 35 (3): 356–65.
PubMed Статья Google Scholar
Холландер Э, Анагностоу Э, Чаплин В., Эспозито К., Хазнедар М.М., Ликальци Э. и др. Стриарный объем на магнитно-резонансной томографии и повторяющемся поведении при аутизме. Биол Психиатрия. 2005. 58 (3): 226–32.
PubMed Статья Google Scholar
Рохас, округ Колумбия, Петерсон Э, Винтерроуд Э, Рейте М.Л., Роджерс С.Дж., Трегеллас мл. Региональные объемные изменения серого вещества при аутизме, связанные с социальными симптомами и симптомами повторяющегося поведения. BMC Psychiatry. 2006; 6 (1): 56.
PubMed PubMed Central Статья Google Scholar
Sears LL, Vest C, Mohamed S, Bailey J, Ranson BJ, Piven J. МРТ-исследование базальных ганглиев при аутизме. Прогресс в нейропсихофармакологии и биологической психиатрии; 1999 г.
Google Scholar
Graybiel AM. Привычки, ритуалы и оценочный мозг. Annu Rev Neurosci. 2008. 31: 359–87.
PubMed Статья CAS Google Scholar
Инь ХХ, Ноултон Б.Дж. Роль базальных ганглиев в формировании привычки. Nat Rev Neurosci. 2006; 7 (6): 464.
PubMed Статья CAS Google Scholar
Глейзбрук С.М., Эллиотт Д., Лайонс Дж. Кинематический анализ того, как молодые люди с аутизмом и без него планируют и контролируют целенаправленные движения. Mot Control. 2006. 10 (3): 244–64.
Артикул Google Scholar
Hue O, Simoneau M, Marcotte J, Berrigan F, Doré J, Marceau P, et al. Вес тела является сильным показателем устойчивости позы. Поза походки. 2007. 26 (1): 32–8.
PubMed Статья Google Scholar
McGraw B, McClenaghan BA, Williams HG, Dickerson J, Ward DS. Стабильность походки и осанки у мальчиков препубертатного возраста с ожирением и без ожирения. Arch Phys Med Rehabil. 2000; 81: 484–9.
PubMed Статья CAS Google Scholar
Все за одного и один за всех! 3 компонента контроля осанки для эффективного движения
Как добиться эффективности движения? Все начинается с контроля осанки.
Постуральный контроль включает вестибулярную систему, зрение и проприоцепцию . Эти три системы обеспечивают обмен данными с мозгом и телом для обеспечения стабильности или подвижности.
Контроль осанки происходит, когда вы находите и контролируете центр масс или когда вы чувствуете вес своего тела в пределах опоры. Стойка на одной ноге (SLS) — отличная отправная точка. Во время SLS у вас есть ограниченная база поддержки для управления центром масс, но вы можете использовать ограниченное количество мышц или совокупность мускулатуры для создания этого баланса.Когда центр масс выровнен внутри опоры и вы используете совокупность мускулатуры, вы получаете эффективный контроль позы, потому что нагрузка равномерно распределяется по суставам и мышцам.
Третий закон равных и противоположных сил Ньютона вступает в силу, поскольку силы реакции земли переносят вес тела обратно вверх. Следовательно, человеческое тело обладает способностью передавать энергию от одного сустава к другому. Эта пассивная передача энергии через суставы обычно равномерно поглощает 60-70% сил в стойке с двумя ногами.Большая часть этого эффективного поглощения энергии теряется во время походки, так как вам необходимо переходить назад и вперед от стойки на двух ногах к стойке на одной ноге. Если центр масс одного сустава не совпадает с основанием опоры, силы направляются на этот сустав, потому что теперь нет равного распределения веса.
К счастью, один из способов уменьшить это снижение эффективности во время ходьбы — это эффективное отталкивание. Использование равных и противоположных сил от земли вверх для перемещения веса тела с задней ноги на переднюю может снизить потерю энергии на 75%.Для этого требуется координация позы и движения для обеспечения динамического контроля. Это оперативность движения! Управление центром масс на опоре во время статических или динамических движений приводит к эффективному распределению веса и активации мышц.
Плохой контроль и отсутствие эффективного движения может привести к другим функциональным ограничениям. Это похоже на тебя? Если это так, свяжитесь с Body Gears сегодня, чтобы запланировать бесплатный экран!
Sousa ASP, Silva A, Tavares JMRS.Биомеханические и нейрофизиологические механизмы, связанные с контролем позы и эффективностью движения: обзор. Соматосенсорные и моторные исследования. 2012; 29 (4): 131-143. DOI: 10.3109 / 089
.2012.725680.
Автор: доктор Эстер Ким PT, DPT
Если вам понравилась эта статья, поделитесь с нами своим мнением и присоединитесь к беседе. Мы будем рады услышать ваши предложения по другим темам, связанным с наукой, анатомией или движением, о которых вы хотели бы узнать больше! Найдите нас в Facebook, Instagram и Twitter @BodyGearsPT
.